基于MATLAB的PID闭环控制系统设计
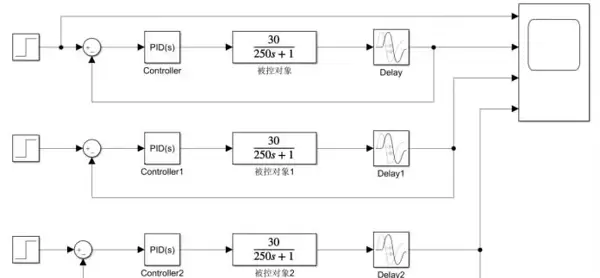
本设计涵盖完整的系统设计报告与仿真程序,构建了一个由控制器、测量元件及变送器、执行器(调节阀)以及调节对象(被控过程)组成的单回路闭环负反馈控制系统。该结构在自动化控制领域中具有基础性地位,广泛应用于各类工业过程控制场景。
系统结构解析
此闭环控制系统可视为一个协同运作的整体机制。其中,控制(调节)器扮演核心角色,依据来自测量元件和变送器的反馈信号,实时计算并输出控制指令至执行机构——即调节阀。调节阀据此对被控过程施加影响,从而实现对系统输出的精确调控。
整个回路通过持续比较设定值与实际测量值之间的偏差,并利用PID算法进行动态修正,确保系统响应快速、稳定且误差最小化。这种负反馈机制是保证控制精度和鲁棒性的关键所在。
PID控制原理与MATLAB实现
为了直观展示PID控制的工作流程,以下提供一段典型的MATLAB仿真代码示例,用于模拟系统在给定输入下的动态响应过程。
% 定义系统参数
Kp = 2; % 比例系数
Ki = 0.5; % 积分系数
Kd = 0.1; % 微分系数
t = 0:0.01:10; % 时间向量,从0到10秒,步长0.01秒
setpoint = ones(size(t)); % 设定值,这里设为常数1
% 初始化变量
error = zeros(size(t));
integral = 0;
derivative = 0;
output = zeros(size(t));
for i = 2:length(t)
error(i) = setpoint(i) - output(i - 1); % 计算误差
integral = integral + error(i) * 0.01; % 积分项,这里简单的用误差和时间步长累积
derivative = (error(i) - error(i - 1)) / 0.01; % 微分项,用前后误差差除以时间步长近似
output(i) = Kp * error(i) + Ki * integral + Kd * derivative; % PID控制律计算输出
end
% 绘图
figure;
plot(t, setpoint, 'r--', 'LineWidth', 1.5); hold on;
plot(t, output, 'b', 'LineWidth', 1.5);
xlabel('Time (s)');
ylabel('Output');
legend('Setpoint', 'PID Output');
grid on;
参数定义与作用分析
在代码实现中,首先设定PID控制器的三个核心参数:
- 比例系数
Kp
:负责对当前误差做出即时响应,提升系统的反应速度,使输出迅速趋近目标值;
- 积分系数
Ki
:通过对误差的累积作用,有效消除稳态偏差,提高控制精度;
- 微分系数
Kd
:根据误差变化率进行预判性调节,抑制超调,增强系统稳定性。
仿真设置与变量初始化
时间向量由
t
定义,表示仿真的时间跨度,而期望的目标输出值设定为
setpoint
。随后对关键变量进行初始化处理:
- 误差变量
error
- 积分项
integral
- 微分项
derivative
- 系统输出
output
控制循环与结果可视化
在主循环中,程序逐时刻更新误差值,累加积分项,计算微分变化,并结合PID公式生成控制输出。最终通过绘图函数将设定值与实际输出随时间的变化曲线绘制出来,便于观察系统的动态性能,如上升时间、超调量、调节时间等指标。
借助MATLAB强大的数值计算与图形显示能力,用户可以高效地搭建模型、调试参数、验证控制策略的有效性。在实际工程应用中,可根据具体被控对象特性反复优化PID参数,以达到最佳控制效果。
本文旨在帮助读者深入理解基于MATLAB平台的PID闭环控制系统的设计思路与实现方法,掌握从理论建模到仿真验证的完整流程。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





