经管之家App
让优质教育人人可得
立即打开


将传感器网络类比为一个“社交网络”,是理解图神经网络(GNN)应用的关键视角。
设想一个由温度、湿度和气压等多种传感器构成的监测系统:
每个传感器被视为彼此独立的数据源,单独进行数据分析。例如:“传感器A显示25°C,传感器B记录到26°C”……这种做法忽略了它们之间可能存在的物理联系与相互影响。
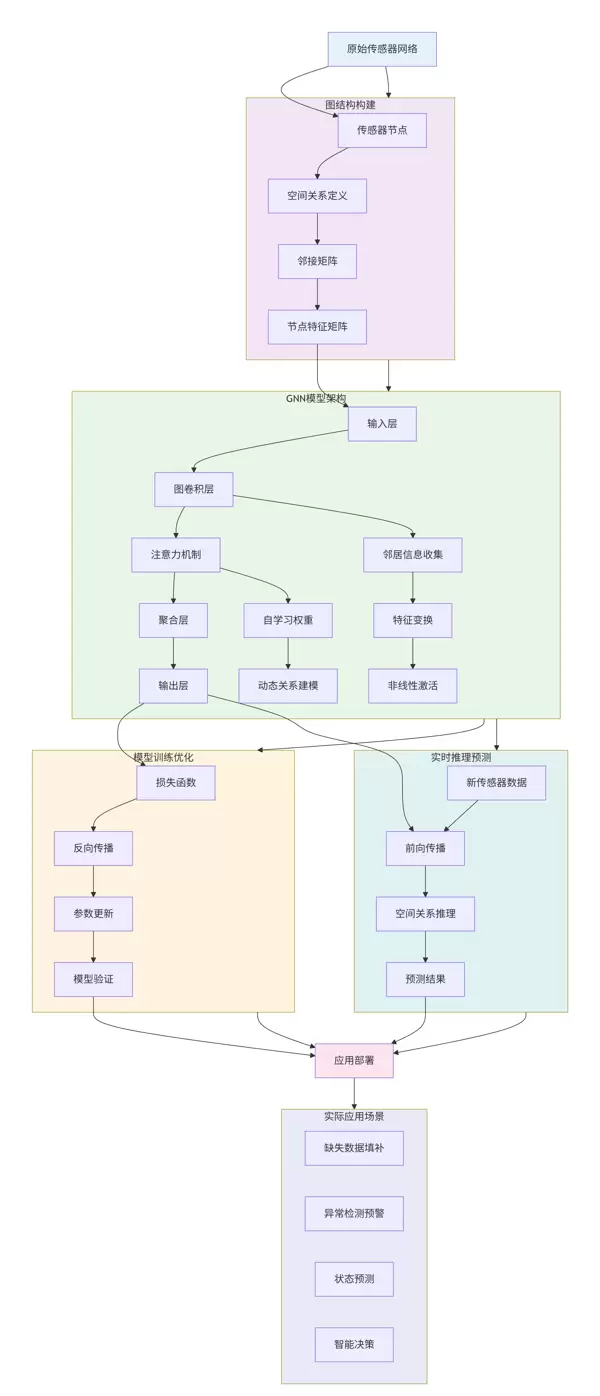
图神经网络的核心在于:将现实世界中分布式的传感器网络抽象成图结构(Graph),并通过节点间的信息传递机制,学习每个传感器在其局部空间环境下的增强特征表示。
1. 独立性假设缺陷
忽视了传感器之间的空间相关性。例如,上游某点发生污染,下游区域很快会受到影响,但传统模型无法自动捕捉此类动态传播过程。
# 传统机器学习方法
for sensor in sensors:
predict(sensor.data) # 每个传感器独立预测2. 手工特征工程复杂且低效
3. 难以应对动态变化
自动学习空间依赖关系
无需人工设定权重,GNN能够从数据中自主推断出传感器之间的相互影响强度。
支持不规则拓扑结构
现实中传感器往往呈非均匀分布,而非理想化的网格布局。GNN天然适用于任意图结构,灵活适应各种部署场景。
强大的泛化能力
训练完成的模型可迁移至不同规模或布局的新网络,并能快速接纳新加入的传感器节点。
实现端到端的学习流程
直接从原始传感数据映射到最终预测结果,减少中间环节造成的信息损失。
首先需要明确两个关键部分:
import torch
import numpy as np
# 假设有5个温度传感器
num_sensors = 5
# 节点特征矩阵:每个传感器的历史数据
# 形状:[节点数, 特征维度]
node_features = torch.tensor([
[25.0, 65, 1013], # 传感器0: [温度, 湿度, 气压]
[26.0, 62, 1012], # 传感器1
[24.5, 68, 1014], # 传感器2
[25.8, 63, 1013], # 传感器3
[23.9, 70, 1015] # 传感器4
], dtype=torch.float)
print(f"节点特征形状: {node_features.shape}") # [5, 3]# 基于距离的空间关系
# 假设传感器间的距离矩阵
distance_matrix = torch.tensor([
[0, 1.0, 2.5, 1.8, 3.2], # 传感器0到其他传感器的距离
[1.0, 0, 1.8, 0.9, 2.5],
[2.5, 1.8, 0, 2.0, 1.2],
[1.8, 0.9, 2.0, 0, 1.8],
[3.2, 2.5, 1.2, 1.8, 0]
])
# 将距离转换为连接关系(距离越小,连接越强)
threshold = 2.0 # 距离阈值
adjacency_matrix = (distance_matrix > 0) & (distance_matrix <= threshold)
adjacency_matrix = adjacency_matrix.float()
print("邻接矩阵:")
print(adjacency_matrix)
# 输出:
# tensor([[0., 1., 0., 1., 0.],
# [1., 0., 1., 1., 0.],
# [0., 1., 0., 0., 1.],
# [1., 1., 0., 0., 1.],
# [0., 0., 1., 1., 0.]])根据任务需求选择图卷积网络(GCN)、图注意力网络(GAT)或其他变体,确保模型具备足够的表达能力和可解释性。
import torch.nn as nn
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
import torch_geometric
class SensorGNN(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(SensorGNN, self).__init__()
# 图卷积层
self.conv1 = GCNConv(input_dim, hidden_dim)
self.conv2 = GCNConv(hidden_dim, hidden_dim)
# 预测层
self.predictor = nn.Linear(hidden_dim, output_dim)
def forward(self, x, edge_index):
# x: 节点特征 [num_nodes, input_dim]
# edge_index: 边索引 [2, num_edges]
# 第一层图卷积 + 激活函数
x = self.conv1(x, edge_index)
x = F.relu(x)
# 第二层图卷积
x = self.conv2(x, edge_index)
x = F.relu(x)
# 最终预测
output = self.predictor(x)
return output
# 将邻接矩阵转换为边索引(GNN需要的格式)
edge_index = torch_geometric.utils.dense_to_sparse(adjacency_matrix)[0]
print(f"边索引形状: {edge_index.shape}") # [2, num_edges]包含数据预处理、图构建、前向传播、损失计算与参数优化等阶段,形成闭环学习体系。
class SensorNetworkGNN:
def __init__(self, num_sensors, feature_dim):
self.num_sensors = num_sensors
self.model = SensorGNN(
input_dim=feature_dim,
hidden_dim=64,
output_dim=1 # 预测温度
)
self.optimizer = torch.optim.Adam(self.model.parameters(), lr=0.01)
self.loss_fn = nn.MSELoss()
def prepare_graph_data(self, sensor_data, distance_matrix):
"""准备图数据"""
# 节点特征:传感器数据
node_features = torch.tensor(sensor_data, dtype=torch.float)
# 构建邻接矩阵(基于距离)
adjacency_matrix = (distance_matrix > 0) & (distance_matrix <= 2.0)
adjacency_matrix = adjacency_matrix.float()
# 转换为边索引
edge_index = torch_geometric.utils.dense_to_sparse(adjacency_matrix)[0]
return node_features, edge_index, adjacency_matrix
def train(self, train_data, distance_matrix, epochs=100):
"""训练模型"""
node_features, edge_index, _ = self.prepare_graph_data(
train_data, distance_matrix
)
self.model.train()
for epoch in range(epochs):
self.optimizer.zero_grad()
# 前向传播
predictions = self.model(node_features, edge_index)
# 计算损失 - 假设预测下一个时间步的温度
targets = torch.tensor(train_data[:, 0] + 0.1, dtype=torch.float).unsqueeze(1)
loss = self.loss_fn(predictions, targets)
# 反向传播
loss.backward()
self.optimizer.step()
if epoch % 20 == 0:
print(f'Epoch {epoch}, Loss: {loss.item():.4f}')
def predict(self, new_sensor_data, distance_matrix):
"""使用训练好的模型进行预测"""
self.model.eval()
with torch.no_grad():
node_features, edge_index, _ = self.prepare_graph_data(
new_sensor_data, distance_matrix
)
predictions = self.model(node_features, edge_index)
return predictions.numpy()
# 使用示例
if __name__ == "__main__":
# 模拟传感器数据 [温度, 湿度, 气压]
sensor_data = np.random.rand(5, 3) * 10 + 20 # 5个传感器,3个特征
# 模拟距离矩阵
dist_matrix = torch.tensor([
[0, 1.2, 2.1, 1.8, 2.9],
[1.2, 0, 1.5, 0.8, 2.3],
[2.1, 1.5, 0, 1.9, 1.1],
[1.8, 0.8, 1.9, 0, 1.7],
[2.9, 2.3, 1.1, 1.7, 0]
])
# 创建并训练GNN模型
gnn_model = SensorNetworkGNN(num_sensors=5, feature_dim=3)
gnn_model.train(sensor_data, dist_matrix)
# 进行预测
new_data = sensor_data + np.random.normal(0, 0.1, sensor_data.shape)
predictions = gnn_model.predict(new_data, dist_matrix)
print("预测结果:", predictions.flatten())使用动态图机制(如时间感知注意力)让模型能适应随时间演变的空间依赖结构,提升对突发情况的响应能力。
# 对于动态变化的空间关系,可以使用注意力机制
class AttentionSensorGNN(nn.Module):
def __init__(self, input_dim, hidden_dim):
super(AttentionSensorGNN, self).__init__()
# 使用图注意力层
self.attention_conv = GATConv(input_dim, hidden_dim, heads=1)
def forward(self, x, edge_index):
# 自动学习传感器间的重要性权重
x = self.attention_conv(x, edge_index)
return x
# 这样模型可以自动学习:
# - 在刮风天,上风向的传感器更重要
# - 在炎热天,阴凉处的传感器更可靠| 对比维度 | 传统方法 | GNN方法 |
|---|---|---|
| 分析模式 | 传感器独立分析 | 网络协同分析 |
| 空间关系处理 | 人工定义 | 自动学习 |
| 适用结构 | 规则网格 | 任意拓扑 |
| 关系性质 | 静态不变 | 动态自适应 |
通过引入图神经网络,原本分散孤立的传感器群体被转化为一个具备协作智能的整体系统,显著增强了环境感知、异常检测与未来趋势预测的准确性与可靠性。

 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏




