一、行业痛点
在传统机器人控制系统中,常见的问题包括:
- AI识别依赖云端:网络延迟导致控制响应缓慢;
- 路径规划算法算力不足:复杂轨迹需耗时计算;
- 控制柜体积大、功耗高:传统x86架构能耗高、散热困难;
- 多轴同步精度不足:路径误差难以实时修正;
- 视觉系统与控制系统割裂:数据同步延迟、难集成。
解决思路:
使用电鱼 EFISH-RK3588 AI工控机作为机器人控制柜核心计算单元,实现“AI视觉识别 + 路径规划 + 实时运动控制”三位一体方案,让机器人具备“自主视觉、智能决策、精准控制”能力。
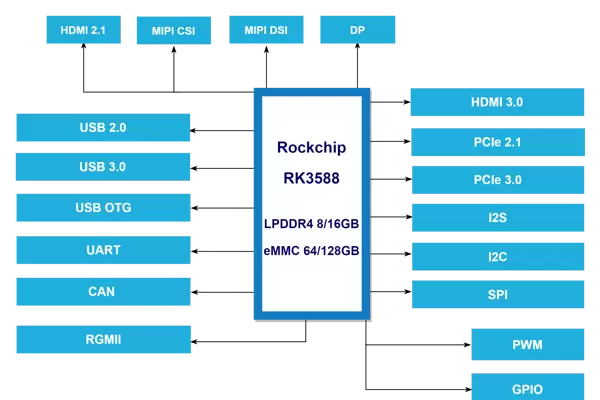
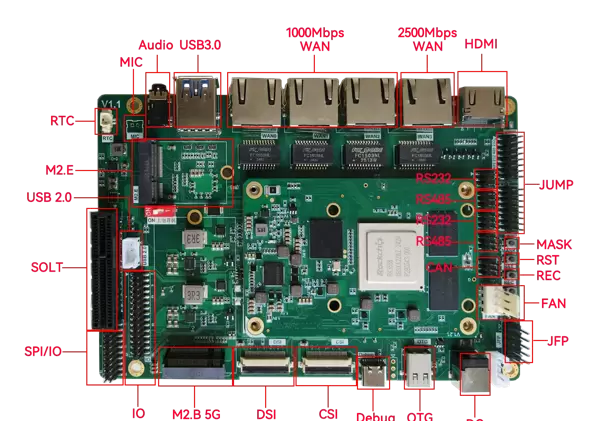
二、核心硬件平台
| 参数 |
电鱼 EFISH-RK3588 AI 工控机 |
| CPU |
8核 Cortex-A76 + A55 |
| NPU算力 |
6 TOPS(AI推理加速) |
| GPU |
Mali-G610,支持OpenCL / Vulkan |
| 内存 |
LPDDR4x 8GB |
| 接口 |
RS485×4 / CAN×2 / Ethernet×2 / HDMI / USB3.0×4 |
| 系统 |
Linux 5.10 / Ubuntu 20.04 |
| AI框架 |
TensorRT / OpenCV / ONNX / PyTorch |
| 扩展性 |
支持MIPI摄像头、SSD存储、Wi-Fi / 5G通信 |
| 工作温度 |
-20℃~70℃(工业级宽温) |
该平台在15W功耗下即可运行复杂的视觉AI模型和实时路径规划算法,兼具高算力与高可靠性,非常适合机器人控制柜使用。
三、系统功能模块
| 模块 |
功能描述 |
技术实现 |
| AI视觉识别模块 |
实时检测工件位置、姿态 |
YOLOv8 / TensorRT 加速 |
| 路径规划模块 |
自动生成机器人运动轨迹 |
A* / RRT / 贝塞尔插值算法 |
| 运动控制模块 |
多轴同步控制、反馈闭环 |
EtherCAT / CANopen |
| 状态采集模块 |
实时采集电流、角度、扭矩等参数 |
Modbus / CAN |
| 异常检测模块 |
判断卡滞、偏差、碰撞等异常 |
AI边缘算法 |
| 人机交互模块 |
本地显示运行状态与报警信息 |
Qt / Web HMI |
| 远程通信模块 |
云端监控与日志上传 |
MQTT / HTTP |
四、AI视觉与路径规划示例
视觉识别代码示例(Python + OpenCV + RKNN)
import cv2, time
from rknn.api import RKNN
rknn = RKNN()
rknn.load_rknn('yolov8n.rknn')
rknn.init_runtime()
cap = cv2.VideoCapture(0)
while True:
??? ret, frame = cap.read()
??? result = rknn.inference(inputs=[frame])
??? boxes = parse_output(result)
??? draw_boxes(frame, boxes)
??? cv2.imshow("AI定位", frame)
??? if cv2.waitKey(1) == 27:
??????? break
RK3588 的 NPU 可在本地完成视觉检测推理,延迟仅 30ms 以内。
路径规划逻辑(A*算法简例)
def a_star(start, goal, grid):
??? open_set = [start]
??? came_from = {}
??? g_score = {start: 0}
??? while open_set:
??????? node = min(open_set, key=lambda x: g_score[x])
??????? if node == goal:
??????????? return reconstruct_path(came_from, node)
??????? open_set.remove(node)
??????? for neighbor in get_neighbors(node, grid):
??????????? tentative = g_score[node] + cost(node, neighbor)
??????????? if neighbor not in g_score or tentative < g_score[neighbor]:
??????????????? came_from[neighbor] = node
??????????????? g_score[neighbor] = tentative
??????????????? open_set.append(neighbor)
RK3588 可同时运行路径规划与AI检测算法,适用于动态目标定位与轨迹修正场景。
五、方案优势
- AI+控制一体化:同平台完成视觉识别、轨迹规划与控制;
- 毫秒级控制响应:实时性满足多轴机器人运动要求;
- 高算力低功耗:6TOPS NPU + 15W功耗;
- 多协议兼容:支持 Modbus / CANopen / EtherCAT;
- 可扩展视觉系统:支持双摄像头输入与AI识别;
- 本地与远程融合:HDMI显示 + 云端监控双通道;
- 易维护可升级:Docker容器化 + OTA远程更新。
六、典型应用场景
- 焊接 / 装配 / 搬运机器人控制系统
- 视觉引导的工业机械臂
- 打磨、喷涂、切割等路径规划机器人
- 智能物流分拣机械臂
- 汽车零部件定位检测与装配系统


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





