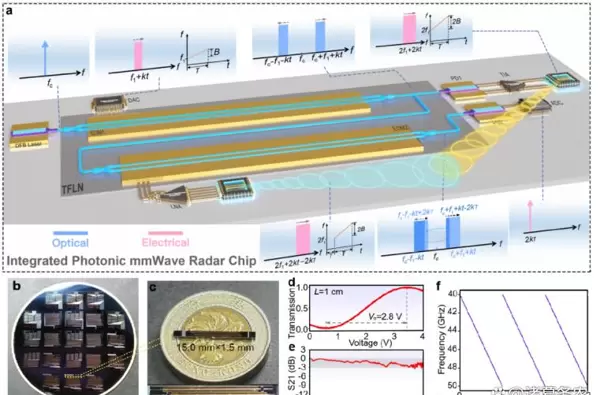
光子毫米波雷达芯片
一、技术种类与工作原理
凭借其独特的优势,毫米波雷达有望成为人形机器人感知世界的重要组成部分。根据工作原理、探测距离和频段,毫米波雷达可以分为不同的类型。
1. 工作原理分类
- 脉冲式毫米波雷达:该技术通过计算发射和接收脉冲信号之间的时间差来确定目标距离。尽管原理简单,但在实际应用中因技术限制和元件性能而难以实现。
- 调频连续波毫米波雷达 (FMCW):这是当前大多数汽车毫米波雷达所采用的技术。它利用多普勒效应,通过分析发射信号与回波信号之间的频率差异,准确测量目标与雷达之间的距离和速度。

2. 探测距离分类
- 近距离毫米波雷达 (SRR):主要用于短距离探测,如24GHz雷达系统。
- 中距离毫米波雷达 (MRR):适用于中等距离的探测需求。
- 远距离毫米波雷达 (LRR):探测距离可达250米,如77GHz雷达系统。
3. 频段分类
- 24GHz毫米波雷达:常用于短距离探测任务,如盲点监测和停车辅助。技术成熟,成本较低,但分辨率和精度低于77GHz雷达。
- 77GHz毫米波雷达:目前在汽车行业中广泛应用。相比24GHz雷达,它具有更远的探测距离、更小的体积和更高的检测精度,但制造难度较大。
- 79GHz毫米波雷达:可能是未来的发展方向,预计能提供更高的分辨率和更宽的带宽。
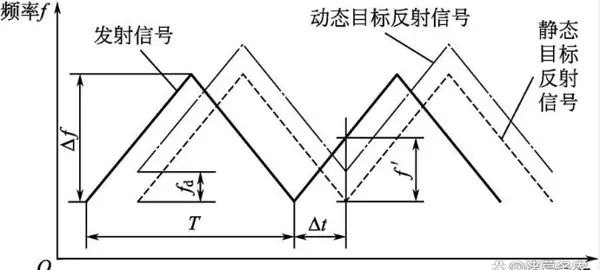
4. 测量原理
以调频连续波(FMCW)雷达为例,其工作原理是发射随时间线性变化的连续波信号。当信号遇到目标时会反射回来。通过混频器将发射信号与回波信号混合,生成低频的差拍信号(即中频信号)。分析此中频信号,结合相关公式,可以计算出目标与雷达间的相对距离和速度。
二、在人形机器人中的应用进展
目前,毫米波雷达在人形机器人中的应用还处于初步探索阶段,但它在多个方面的潜力正逐渐显现。
1. 恶劣环境下的感知补偿
毫米波雷达的一大优势在于其强大的穿透力,能在雨、雪、大雾等恶劣天气条件下保持较高的工作效率,有效补充视觉传感器和激光雷达在这些环境下的不足。例如,国内领先的人形机器人企业(如宇树科技、优必选)虽然主要依赖激光雷达和相机,但也开始探索多传感器融合策略,将毫米波雷达作为辅助感知手段。
2. 运动速度感知与避障
由于响应迅速,毫米波雷达能够快速准确地测量目标的角度、距离和速度等信息,特别适合用于人形机器人感知周围动态物体的运动状态,提高避障能力。相较于超声波雷达,毫米波雷达在探测距离、精度及抗干扰方面表现更佳。
3. 特定场景下的辅助定位与导航
研究人员正尝试利用毫米波雷达进行自我运动估计。例如,milliEgo项目开发了一种基于低成本单芯片毫米波雷达的深度学习方法,用以辅助实现稳定的轨迹估计。这种方法通过与惯性或视觉传感器的深度结合,增强了系统的环境适应性,显示出毫米波雷达在SLAM(同步定位与地图构建)领域的潜在价值。

4. 穿透性探测
毫米波能够穿透一些非金属物质,如塑料、衣物等,这让人形机器人能够在特定情况下探测到隐藏的物体,或者感知到物体后面的情况。这种能力对于仓储物流中的货物查找或是家庭服务机器人来说尤为重要。
三、不足与限制
尽管毫米波雷达拥有显著的优点,但在应用于人形机器人时仍面临一些挑战:
1. 分辨率与成像能力有限
传统的毫米波雷达角分辨率较低,难以生成高质量的三维图像,无法像激光雷达那样精细地重建环境模型。此外,它也无法识别道路标识、交通信号等细节,必须依赖算法和数据库来区分不同类型的物体。
2. 无法识别物体材质和纹理
毫米波雷达只能提供目标的基本信息,如距离、速度和大致轮廓,无法捕捉颜色、纹理等视觉细节,也无法确定物体的确切材质,这限制了其对环境的深入理解能力。
3. 存在盲区与遮挡问题
毫米波雷达在某些情况下可能会受到遮挡物的影响,导致部分区域无法有效探测,形成盲区。这一问题同样需要通过算法优化和多传感器融合等方式加以解决。
毫米波雷达的波束具有一定宽度,形成扇形覆盖区域,存在盲点。对于低矮、细小的物体,雷达可能无法有效检测。此外,多个雷达同时使用时,可能会产生相互干扰。
数据处理与算法挑战:
毫米波雷达产生的原始数据(中频信号)较为复杂,需要通过一系列信号处理步骤,包括滤波、傅里叶变换、CFAR检测等,来提取目标信息。将这些稀疏的点云数据与其他传感器(如视觉传感器)的数据进行有效且实时的融合,并准确地区分不同目标(如行人与车辆),是当前算法面临的主要挑战。
在人形机器人上的集成考量:
当前,获取77GHz等高频毫米波雷达的射频芯片仍面临一定困难。尽管毫米波雷达模块正在逐步小型化,但由于人形机器人对重量、尺寸和功耗有严格的要求,如何高效地将雷达集成到机器人中仍然是一个需要深入探讨的问题。
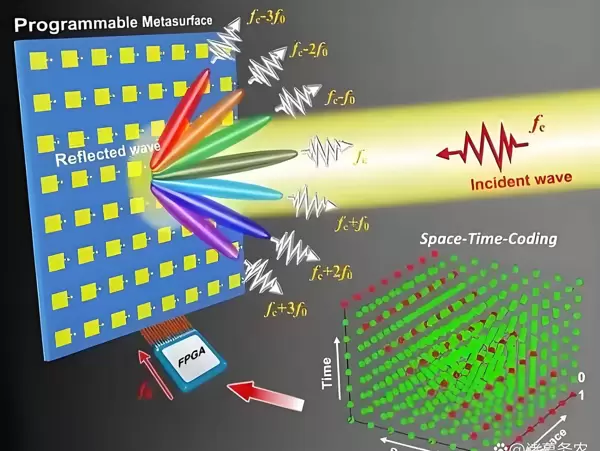
毫米波“数字编码和现场可编程超材料”的研究,为雷达技术的发展提供了新的思路。
改进方向与前沿技术突破
为了解决上述限制,毫米波雷达技术正在经历不断的革新,以更好地服务于人形机器人及其他广泛的机器感知应用:
- 4D成像毫米波雷达:这是毫米波雷达技术的一个重要发展方向。4D成像雷达不仅能够测量传统的距离、速度和方位角,还能够精确测量俯仰角(即高度维度),从而实现高分辨率的3D点云成像。例如,Meta的FoveaRadar声称达到了0.1°的角分辨率(而传统雷达为3°),在60GHz频段通过MIMO阵列实现了厘米级的点云精度。这一技术显著提升了毫米波雷达对物体轮廓和周围环境的感知能力,特别适合需要精细操作的机器人平台。
- 芯片化与集成度提升:行业正朝着高度集成化的单芯片解决方案发展,旨在将射频前端、信号处理单元乃至人工智能加速核心集成在单一芯片上。比如,TI的IWR6843等60GHz毫米波雷达系统级芯片(SoC),具有4接收3发射通道,并内置了DSP和MCU。这种设计有助于显著减少设备体积,降低功耗和成本,非常适合对空间和功耗有严格要求的人形机器人应用。
- 深度学习与智能融合:如milliEgo项目所展示的那样,深度学习技术正在被用来解决毫米波雷达数据处理中的低分辨率和稀疏性问题,直接从数据中学习更精确的运动和环境结构预测方法。通过混合注意力机制等先进的融合技术,可以更稳健地将毫米波雷达数据与摄像头、IMU、激光雷达等其他传感器的数据结合,充分利用各传感器的优势,达到1+1>2的感知效果。
- 先进材料与工艺:尽管氧化镓(Ga2O3)等第四代半导体材料主要应用于高性能军事雷达,但它们所代表的宽带隙半导体技术趋势同样影响着民用领域。这些新材料能够提供更高的功率密度、更高的工作频率和更紧凑的设计,未来可能被引入高端机器人传感器中。
- 功能安全与可靠性:毫米波雷达芯片的设计越来越注重功能安全性。例如,TI的IWR6843已获得TUV SUD认证,符合IEC 61508 SIL-2的安全标准。与之匹配的处理器(如TDA4x)则支持ASIL-D/SIL-3级别的安全性能。这对于保障人形机器人在复杂环境下的安全稳定运行至关重要。
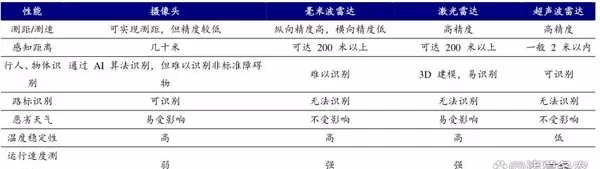
人形机器人环境感知中常用的四种传感器比较。
总结与展望
小结
毫米波雷达以其独特的测速准确性、不受恶劣天气和光照条件影响、能够穿透特定材料等优点,为机器人提供了一个重要的感知维度。不过,其分辨率较低、成像能力有限以及需要依靠算法进行目标识别的局限性,使得它在短期内不太可能取代视觉或激光雷达成为主要传感器。相反,毫米波雷达将在传感器融合系统中扮演关键角色,特别是在恶劣环境下的感知、移动目标的速度测量和穿透探测等应用场景中。
未来的主攻方向
- 不断提高分辨率:通过4D成像技术、MIMO技术、超大规模天线阵列等手段,推动毫米波雷达向“高清”方向发展。
- 深化人工智能融合:运用深度学习技术增强毫米波雷达的数据处理能力和多模态数据的融合,提高感知系统的智能化水平和对环境的理解能力。
- 推进芯片化与成本降低:开发高度集成的单芯片解决方案,并采用先进制造工艺,进一步缩小尺寸、减少能耗和成本,以满足机器人批量生产的需求。
- 优化在机器人上的集成与应用:研究人形机器人上最合适的雷达安装位置、数量配置方案,以及针对具体机器人任务(如步态分析中的地面反射过滤、近距离精细操作辅助等)的专门算法。

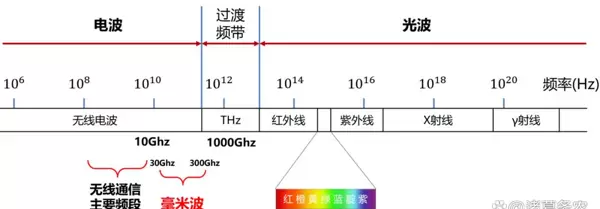
毫米波5G频段的应用前景。
【免责声明】本文内容基于公开资料和信息整理而成,部分观点引用自AI分析。仅供读者参考,不做任何决策依据,风险自负。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





