在机器人科研不断迈向真实应用场景的过程中,动作捕捉技术正逐步成为驱动智能体行为进化的关键支撑。尤其是在从实验室走向户外的过渡阶段,如何在日光环境下实现高精度的动作追踪,已成为制约技术落地的重要瓶颈。这一难题不仅影响数据采集的可靠性,更直接关系到机器人在复杂环境中的适应能力与性能优化。
NOKOV度量动作捕捉系统依托先进的光学设计与智能化算法,在强光干扰条件下仍可实现亚毫米级精度的运动轨迹还原,成功突破了传统系统对光照条件的依赖,为室外机器人研究提供了稳定可靠的数据基础。
技术核心:应对日光干扰的双重突破
面对日光带来的红外噪声、标记点过曝以及金属表面高光反射等挑战,NOKOV度量系统通过硬件与软件协同优化,实现了对复杂光照环境的有效抑制。
系统搭载高性能红外相机,并结合特制光学滤波装置,能够精准筛选特定波长的红外信号,有效屏蔽日光中混杂的可见光成分,从源头降低环境光干扰。
同时,内置的智能曝光控制算法可根据实时光照强度动态调节相机参数,防止标记点因强光照射而失真或消失,确保在直射阳光下依然保持清晰识别。
在数据处理端,其三维重建引擎具备强大的抗遮挡与抗干扰能力,能基于空间分布特征准确匹配和追踪标记点,即使在部分遮挡或反光干扰情况下,也能稳定输出六自由度位姿信息。
多场景应用:赋能多样化机器人研究
人形机器人动作生成
国防科技大学“智行者”项目团队借助NOKOV系统对人形机器人全身运动进行高精度追踪,获取复杂动作下的动态轨迹数据,为算法训练与控制策略优化提供支持。该研究凭借出色的表现荣获IROS 2025 IROS EXPO最佳展示奖。
精细操作与遥操作控制
大阪大学万伟伟教授团队利用NOKOV系统开展协作机器人的远程操控实验,不仅实现了对刚性物体的操作控制,还成功完成布料拉伸、“插笔帽”等涉及柔性体的精细任务,验证了系统在微小动作捕捉方面的卓越性能。
仿生运动建模与规划
在仿生机器人领域,研究人员通过采集人体下肢运动数据,构建精确的关节运动模型。NOKOV系统提供的高质量运动学参数,为仿生机构的设计与步态规划提供了科学依据。
实战验证:真实环境下的稳定表现
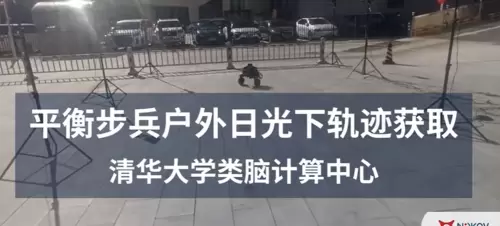
清华大学类脑计算中心在轮足机器人测试中面临严峻挑战:机器人表面材质极易产生强烈反光,且实验需在全日照条件下进行。传统动捕系统难以稳定识别标记点。
通过采用NOKOV度量系统的抗日光镜头方案,研究团队成功滤除环境强光干扰,准确捕捉平衡步兵机器人在动态行走过程中的细微姿态变化,获得连续、高精度的运动轨迹数据,为后续控制算法迭代提供了坚实支撑。
南方科技大学付成龙教授团队则将NOKOV光学三维动作捕捉系统与三维测力台、表面肌电仪同步集成,用于采集人体在自然行走状态下的多模态生物力学数据。即便在光线波动较大的室外场景中,系统仍保持高度稳定性,为动力型假肢的研发提供了精准的步态分析基础。
从室内到室外:机器人科研的技术跃迁
随着机器人应用场景向城市街道、野外地形等开放环境延伸,对动作捕捉系统的要求也日益提升——更大覆盖范围、更强抗干扰能力、更高实时性成为刚需。
传统局限于恒光实验室的动捕方案已无法满足现代机器人研发需求。而能够在日光下稳定工作的NOKOV度量系统,正在填补这一技术空白,助力研究者在真实世界中验证算法、优化模型。
未来展望:融合创新推动智能进化
动作捕捉技术正与人工智能、类脑计算等领域深度融合,形成跨学科的研究新范式。NOKOV系统已在多个前沿项目中展现出强大的平台兼容性与数据支撑能力。
无论是人形机器人、轮足机器人,还是多机协同集群系统,该技术均能提供一致、可靠的运动感知输入,加速机器人从“能动”向“会思考”演进。
每一次在光照、空间与动态复杂性上的突破,都在拓展机器人研究的可能性边界。NOKOV度量动作捕捉系统以其出色的室外适应能力,正成为解锁机器人自然行为规律的核心工具,推动智能体在真实环境中实现更高水平的自主性与适应性。
在通往真正智能机器的道路上,精准感知始终是行动的前提。而能在日光下持续稳定运行的动作捕捉系统,正让这一前提变得更加坚实可靠。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





