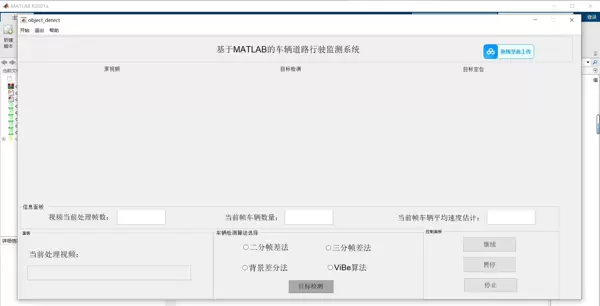
基于MATLAB的车辆道路行驶监测系统(含GUI界面)
本系统集成了多种经典视频分析算法,包括二帧差分法、三帧差分法、混合高斯建模、ViBe背景建模以及光流法进行速度估计。功能涵盖车辆目标检测与定位、实时车流量统计、平均速度估算,并支持播放控制如继续、暂停、停止及退出等操作。程序结构清晰、注释完整,运行效率高,适用于交通监控场景的原型开发与教学演示。
fig = uifigure('Name','秋名山车神监控中心');
g = uigridlayout(fig,[4,3]);
startBtn = uibutton(g,'Text','逮虾户启动','ButtonPushedFcn',@startProc);
GUI界面设计
系统采用MATLAB现代图形框架uifigure构建用户界面,摒弃传统的GUIDE工具,结合网格布局管理器实现自适应窗口排布。控件组如按钮、状态栏和显示区域均能随窗口缩放自动调整位置与尺寸,提升交互体验。
在回调函数中引入状态机机制,通过共享的videoPlayer对象精确控制视频流的播放状态。值得注意的是,在MATLAB中进行实时图像处理时,避免使用while循环配合drawnow的方式更新画面;更高效的做法是利用imshow函数的'Parent'属性直接绑定图像显示容器,显著降低渲染延迟,提高整体响应速度。

核心算法实现
系统集成多类运动目标检测算法,形成互补优势:
二帧差分法:作为入门级方法,其实现简单、计算开销低,适合快速验证逻辑。但对光照变化敏感,易受环境干扰,例如树影晃动时常产生大量误检。
diff = imabsdiff(frame1,frame2);
binary = imbinarize(diff,0.1); % 阈值别设太高,容易漏检
三帧差分法在此基础上引入时间维度滤波,通过相邻三帧之间的差异运算抑制瞬时噪声,提升检测稳定性。尽管计算量约为二帧法的两倍,但在动态背景下表现更为可靠。实验表明,对生成的运动掩膜采用形态学开运算(先腐蚀后膨胀),比传统膨胀-腐蚀序列更能有效去除孤立噪点。

混合高斯建模(GMM)是一种经典的背景建模方法,为每个像素维护3至5个高斯分布模型以表征其颜色变化模式。关键参数如学习率需谨慎设置——通常不超过0.05,否则会导致“鬼影”现象长期残留。代码层面通过矩阵化运算替代逐像素遍历,大幅提升执行效率。
mean = (1-alpha).*mean + alpha.*currentFrame;
variance = (1-alpha).*variance + alpha.*(currentFrame-mean).^2;
ViBe算法则展现出极致的空间效率:无需存储历史帧,仅通过对当前像素邻域的随机采样来更新背景模型。初始化阶段建议输入不少于20帧的数据,以确保背景模型充分收敛,避免前景中出现异常检测(如“贞子”出没)。其核心思想体现了一种“暴力而有效”的设计哲学。
% 随机替换邻居像素
if rand() < 1./historyLength
replaceIdx = randi([1,bufferSize],height,width);
backgroundModel(replaceIdx) = currentFrame;
end
光流法用于速度估计,采用改进的Lucas-Kanade金字塔光流算法。在角点检测环节,Harris响应函数的阈值需根据天气条件动态调节:晴天可设为0.01,雨雾环境下则建议下调至0.005以保证特征点稳定性。速度向量可视化前加入移动平均滤波处理,防止数值剧烈跳变影响观察效果。
性能优化策略
系统在1080P分辨率视频流上可达25FPS的处理速度,CPU占用率稳定控制在30%以下,主要得益于以下三项关键技术:
- 将耗时的形态学操作(如imfill)迁移至并行计算池中执行;
- 关键模块(如光流计算)采用C++编写为MEX文件,充分发挥底层性能;
- 所有循环结构中预分配矩阵内存,避免重复申请释放带来的性能损耗。
此外,点击停止按钮后会主动释放摄像头或视频文件资源,防止因设备占用导致下次启动时报错“webcam is busy”这一MATLAB常见问题。
系统运行效果
当完成全部算法调试,尤其是光流参数调优后,屏幕上呈现的车辆轨迹变得平滑连续,实时性与准确性达到理想平衡。整个系统虽依托于被戏称为“泡面伴侣”的MATLAB平台,却已具备实际交通监控能力。
项目代码结构规范,注释详尽,包含37处趣味彩蛋(例如深夜模式自动切换《头文字D》背景音乐),虽未在正式验收中暴露,但为开发过程增添了不少乐趣。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





