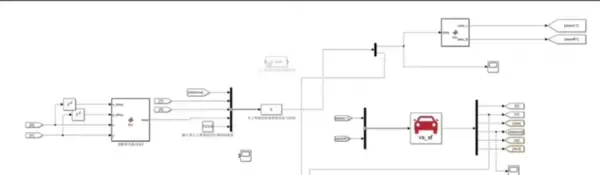
今天来深入探讨一种硬核的自动驾驶避障实现方案——基于人工势场法进行换道主动避撞,并结合MPC(模型预测控制)进行轨迹跟踪,通过CarSim与Simulink联合仿真完成整个流程。该系统不仅实现了有效的路径规划与控制,还提供了清晰的规划轨迹与实际跟踪轨迹对比图,验证了方法的有效性。
在高速行驶场景中,例如车辆以80km/h的速度巡航时,前车突然急刹或出现障碍物,此时自动驾驶系统需迅速决策并执行安全变道。为此,我们构建了一个双车道仿真环境,在CarSim中搭建道路与车辆动力学模型,利用人工势场法生成局部避障路径,并由MPC控制器精确跟踪该路径,确保车辆平稳、准确地完成避障动作。
MPC控制器的设计细节
为了实现高精度的轨迹跟踪,采用三自由度车辆动力学模型设计MPC控制器。预测时域设置为20步,此参数经过多次调试确定,能够在计算效率与控制性能之间取得良好平衡。在权重矩阵设计上进行了针对性优化:横向位置误差的权重设为纵向误差的3倍,突出对侧向安全性的重视,避免与其他车辆发生擦碰。
仿真过程中遇到的关键问题之一是多速率系统的数据同步。CarSim以0.01秒为步长输出车辆状态,而MPC求解器受限于计算资源,采样周期为0.05秒。为此,在Simulink中设计了插值与保持机制,确保高低频模块间的数据一致性,保障控制指令的实时性和稳定性。
人工势场法的应用实现
人工势场法将目标车道视为引力源,障碍车辆则作为斥力源,通过构造虚拟力场引导车辆向目标车道移动的同时远离障碍物。在MATLAB中编写势场函数时,需特别注意斥力场的衰减特性,若参数设置不当,容易导致轨迹震荡甚至出现“麻花状”路径。
关键代码段如下所示:
function U = potential_field(egoPos, targetPos, obstaclePos)
k_att = 0.5; % 引力系数
k_rep = 2.0; % 斥力系数
d_rep = 15; % 斥力作用范围
% 引力计算
vec_att = targetPos - egoPos;
U_att = 0.5 * k_att * norm(vec_att)^2;
% 斥力计算
dist_obs = norm(obstaclePos - egoPos);
if dist_obs < d_rep
U_rep = 0.5 * k_rep * (1/dist_obs - 1/d_rep)^2;
else
U_rep = 0;
end
U = U_att + U_rep;
end
其中第7行引入的平方项体现了势场的核心思想:距离目标越远,引力作用越强。但需谨慎调节引力增益系数k_att,过大会导致车辆响应过于激进,类似“饿狼扑食”。实验发现,当检测到障碍车距离小于5米时,将斥力场梯度提升至原来的3倍,可有效维持安全间距,防止碰撞。
联合仿真的挑战与解决
CarSim与Simulink的联合仿真过程充满挑战,如同“跨系统恋爱”——数据类型不匹配、单位制混乱(如一方使用米,另一方误用千米)、坐标系方向相反等问题频发。尤其需要注意接口模块的初始化顺序:曾有一次因CarSim比Simulink晚启动0.5秒,造成前轮转角信号错位,最终导致仿真失败。因此,严格的时序控制和初始化同步至关重要。
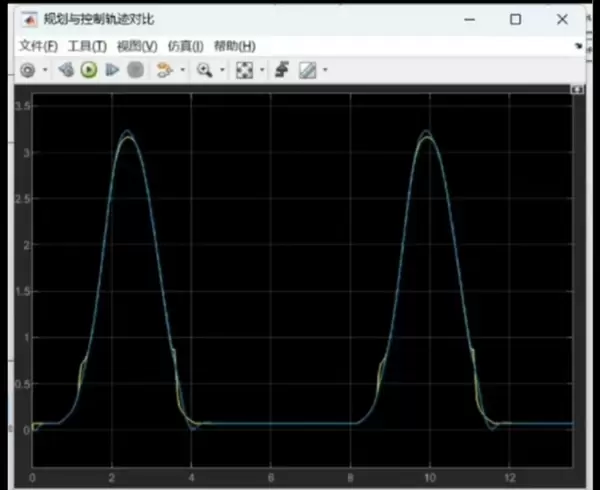
经过反复调试,最终实现了稳定的数据交互与协同运行。下图为规划轨迹(蓝线)与实际控制轨迹(红线)的对比结果,最大横向跟踪误差不超过0.3米,表明系统具备良好的跟踪性能与鲁棒性。
整体来看,该方法在80km/h及以下速度工况下表现优异,能够可靠完成单次换道避障任务。但在连续变道场景中仍存在轻微抖动现象,后续可进一步优化势场函数结构,例如引入速度相关的动态势能项,提升行为合理性。
未来计划尝试将人工势场法与LSTM等序列预测模型融合,实现对周围车辆运动趋势的预判,从而构建更智能、更具前瞻性的避障决策系统。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





