经管之家App
让优质教育人人可得
立即打开


夕阳西下,成群的候鸟在天空中划出美丽的弧线。它们没有统一的指挥,却能默契地调整飞行方向,共同寻找温暖的栖息地。这种自然界中群体协作寻找目标的场景,正是粒子群优化算法(Particle Swarm Optimization, PSO)的灵感来源。
技术是桥梁,使计算机能够学会群体协作的智慧。在复杂的问题空间中寻找最优解时,PSO算法就像一群协同工作的智能体,通过个体经验与集体智慧的平衡,在广大的搜索空间中高效地找到那片“最优的栖息地”。
想象你在一片广阔的山丘中寻找最高点,但浓雾弥漫,视野受限。你只能依靠脚下坡度的感受和与同伴的沟通来做出决策。每个人既参考自己发现的最高位置的记忆,又关注群体中找到的最高点,通过这样的协作,整个群体能快速锁定目标。
这正是PSO要解决的核心问题:在高维、非线性、多峰值的复杂搜索空间中,如何高效地找到全局最优解。
传统的梯度下降法像一个人在浓雾中独自摸索,容易陷入局部最优的“小山坡”而错过真正的“最高峰”。遗传算法虽然引入了群体概念,但操作复杂,需要交叉、变异等生物进化机制。PSO的优雅之处在于其简洁性:仅通过位置和速度的更新,就能实现高效的全局搜索。
每个“粒子”代表一个潜在的解决方案,它们在搜索空间中飞行,通过两个关键因素调整自己的轨迹:个体认知(粒子自身找到的历史最优位置)和社会认知(整个群体找到的全局最优位置)。
速度更新公式: 新速度 = 惯性 × 原速度 + 个体学习 × (个体最优 - 当前位置) + 社会学习 × (全局最优 - 当前位置)
用生活类比理解:
- 惯性项:保持原有飞行方向的“习惯势力”,避免急转弯。
- 个体认知项:基于个人经验的“怀旧情绪”,趋向自己找到的好位置。
- 社会认知项:向优秀同伴学习的“从众心理”,趋向群体找到的最佳位置。
位置更新公式: 新位置 = 原位置 + 新速度
这就像鸟群中每只鸟根据自己经验和群体信息,调整飞行方向和速度。
惯性权重ω:平衡全局探索与局部开发
- ω较大:粒子飞行速度快,全局探索能力强
- ω较小:局部精细搜索,收敛精度高
学习因子c1、c2:平衡个体经验与群体智慧
- c1 > c2:粒子更相信自己的经验
- c2 > c1:粒子更倾向于跟随群体
优秀的PSO调参如同指挥交响乐团,需要在探索(寻找新区域)和利用(精细搜索已知好区域)之间找到完美平衡。太强的探索可能导致收敛慢,太强的利用可能陷入局部最优。
下面我们通过完整的MATLAB脚本来实现粒子群算法,并可视化优化过程。
%% 粒子群算法(PSO)MATLAB实现 - 多维函数优化
% 功能说明:本代码实现标准粒子群算法,用于求解多维函数最小值问题
% 以Rastrigin函数为例,展示PSO的优化过程和收敛特性
% 运行后将生成粒子运动轨迹动画和收敛曲线
clear; close all; clc;
%% 参数设置
n_particles = 30; % 粒子数量
max_iter = 100; % 最大迭代次数
dim = 2; % 问题维度(2维便于可视化)
% PSO参数
w = 0.729; % 惯性权重
c1 = 1.49445; % 个体学习因子
c2 = 1.49445; % 社会学习因子
% 搜索空间范围
x_min = -5.12;
x_max = 5.12;
v_max = (x_max - x_min) * 0.2; % 速度限制
%% 初始化粒子群
% 位置初始化
positions = x_min + (x_max - x_min) * rand(n_particles, dim);
% 速度初始化
velocities = -v_max + 2 * v_max * rand(n_particles, dim);
% 个体最优位置
pbest_positions = positions;
% 个体最优适应度
pbest_values = inf(n_particles, 1);
% 全局最优位置和适应度
gbest_position = zeros(1, dim);
gbest_value = inf;
%% 初始化适应度计算
% 目标函数:Rastrigin函数(多峰值测试函数)
for i = 1:n_particles
current_value = rastrigin(positions(i, :));
% 更新个体最优
if current_value < pbest_values(i)
pbest_values(i) = current_value;
pbest_positions(i, :) = positions(i, :);
end
% 更新全局最优
if current_value < gbest_value
gbest_value = current_value;
gbest_position = positions(i, :);
end
end
%% 记录收敛过程
convergence_curve = zeros(max_iter, 1);
particle_history = zeros(n_particles, dim, max_iter);
%% PSO主循环
figure('Position', [100, 100, 1200, 500]);
for iter = 1:max_iter
% 记录当前粒子位置
particle_history(:, :, iter) = positions;
for i = 1:n_particles
% 计算随机因子
r1 = rand(1, dim);
r2 = rand(1, dim);
% 速度更新公式
velocities(i, :) = w * velocities(i, :) + ...
c1 * r1 .* (pbest_positions(i, :) - positions(i, :)) + ...
c2 * r2 .* (gbest_position - positions(i, :));
% 速度边界处理
velocities(i, :) = max(min(velocities(i, :), v_max), -v_max);
% 位置更新
positions(i, :) = positions(i, :) + velocities(i, :);
% 位置边界处理
positions(i, :) = max(min(positions(i, :), x_max), x_min);
% 计算新适应度
current_value = rastrigin(positions(i, :));
% 更新个体最优
if current_value < pbest_values(i)
pbest_values(i) = current_value;
pbest_positions(i, :) = positions(i, :);
end
end
% 更新全局最优
for i = 1:n_particles
if pbest_values(i) < gbest_value
gbest_value = pbest_values(i);
gbest_position = pbest_positions(i, :);
end
end
% 记录收敛曲线
convergence_curve(iter) = gbest_value;
%% 实时可视化
subplot(1, 2, 1);
plot_optimization_process(positions, gbest_position, x_min, x_max, iter);
subplot(1, 2, 2);
semilogy(1:iter, convergence_curve(1:iter), 'b-', 'LineWidth', 2);
xlabel('迭代次数');
ylabel('最优适应度(对数尺度)');
title('收敛曲线');
grid on;
drawnow;
% 显示迭代信息
fprintf('迭代 %d/%d, 最优值: %.6f\n', iter, max_iter, gbest_value);
% 收敛判断
if iter > 10 && abs(convergence_curve(iter) - convergence_curve(iter-1)) < 1e-6
fprintf('算法已收敛于第 %d 代\n', iter);
break;
end
end
%% 最终结果展示
fprintf('\n=== 优化结果 ===\n');
fprintf('全局最优位置: [%.6f, %.6f]\n', gbest_position);
fprintf('全局最优值: %.6f\n', gbest_value);
fprintf('理论最优值: 0.000000\n');
%% 参数对比实验
figure('Position', [100, 100, 1000, 800]);
compare_parameters();
%% Rastrigin函数定义
function value = rastrigin(x)
% Rastrigin函数:多峰值测试函数,全局最小值在原点,值为0
% 公式:f(x) = 10n + Σ[x_i^2 - 10cos(2πx_i)]
A = 10;
n = length(x);
value = A * n + sum(x.^2 - A * cos(2 * pi * x));
end
%% 优化过程可视化函数
function plot_optimization_process(positions, gbest, x_min, x_max, iter)
% 绘制搜索空间和粒子位置
[X, Y] = meshgrid(linspace(x_min, x_max, 100));
Z = zeros(size(X));
for i = 1:size(X, 1)
for j = 1:size(X, 2)
Z(i, j) = rastrigin([X(i, j), Y(i, j)]);
end
end
contourf(X, Y, Z, 50, 'LineStyle', 'none');
colormap(jet);
colorbar;
hold on;
% 绘制粒子
scatter(positions(:, 1), positions(:, 2), 40, 'white', 'filled', ...
'MarkerEdgeColor', 'black', 'LineWidth', 1);
% 标记全局最优
scatter(gbest(1), gbest(2), 100, 'red', 'filled', 'pentagram', ...
'MarkerEdgeColor', 'yellow', 'LineWidth', 2);
hold off;
title(sprintf('粒子群优化过程 (迭代: %d)', iter));
xlabel('x1');
ylabel('x2');
axis([x_min, x_max, x_min, x_max]);
end
%% 参数对比函数
function compare_parameters()
% 对比不同参数设置对PSO性能的影响
test_cases = {
{'高惯性权重', 0.9, 1.2, 1.2}, % w较大,探索性强
{'低惯性权重', 0.4, 1.2, 1.2}, % w较小,开发性强
{'个体导向', 0.729, 2.0, 0.5}, % c1较大,重视个体经验
{'社会导向', 0.729, 0.5, 2.0}, % c2较大,重视群体经验
{'平衡参数', 0.729, 1.494, 1.494} % 标准参数
};
max_iter = 100;
n_particles = 50;
dim = 2;
x_min = -5.12;
x_max = 5.12;
for case_idx = 1:length(test_cases)
case_info = test_cases{case_idx};
case_name = case_info{1};
w = case_info{2};
c1 = case_info{3};
c2 = case_info{4};
% 初始化
positions = x_min + (x_max - x_min) * rand(n_particles, dim);
velocities = zeros(n_particles, dim);
pbest_positions = positions;
pbest_values = inf(n_particles, 1);
gbest_position = zeros(1, dim);
gbest_value = inf;
% 计算初始适应度
for i = 1:n_particles
current_value = rastrigin(positions(i, :));
if current_value < pbest_values(i)
pbest_values(i) = current_value;
pbest_positions(i, :) = positions(i, :);
end
if current_value < gbest_value
gbest_value = current_value;
gbest_position = positions(i, :);
end
end
convergence = zeros(max_iter, 1);
% PSO迭代
for iter = 1:max_iter
for i = 1:n_particles
r1 = rand(1, dim);
r2 = rand(1, dim);
velocities(i, :) = w * velocities(i, :) + ...
c1 * r1 .* (pbest_positions(i, :) - positions(i, :)) + ...
c2 * r2 .* (gbest_position - positions(i, :));
velocities(i, :) = max(min(velocities(i, :), 1), -1);
positions(i, :) = positions(i, :) + velocities(i, :);
positions(i, :) = max(min(positions(i, :), x_max), x_min);
current_value = rastrigin(positions(i, :));
if current_value < pbest_values(i)
pbest_values(i) = current_value;
pbest_positions(i, :) = positions(i, :);
end
end
% 更新全局最优
for i = 1:n_particles
if pbest_values(i) < gbest_value
gbest_value = pbest_values(i);
gbest_position = pbest_positions(i, :);
end
end
convergence(iter) = gbest_value;
end
% 绘制收敛曲线
subplot(2, 3, case_idx);
semilogy(1:max_iter, convergence, 'LineWidth', 2);
title(sprintf('%s\nw=%.3f, c1=%.3f, c2=%.3f', case_name, w, c1, c2));
xlabel('迭代次数');
ylabel('适应度');
grid on;
end
sgtitle('不同PSO参数设置的性能对比');
end运行说明:
- 将代码保存为
pso_optimization.m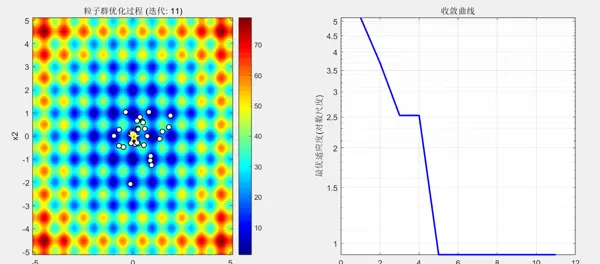
粒子运动轨迹图: 白色圆点代表各个粒子在搜索空间中的位置;红色五角星标记当前找到的全局最优解;背景等高线显示目标函数的地形特征。从动画中可以观察到,粒子群最初随机分布,随后逐渐向全局最优点(原点附近)聚集,体现了群体智能的涌现行为。
收敛曲线: 显示算法随迭代次数增加,最优适应度持续下降,最终趋近于理论最优值0,验证了PSO的有效性。
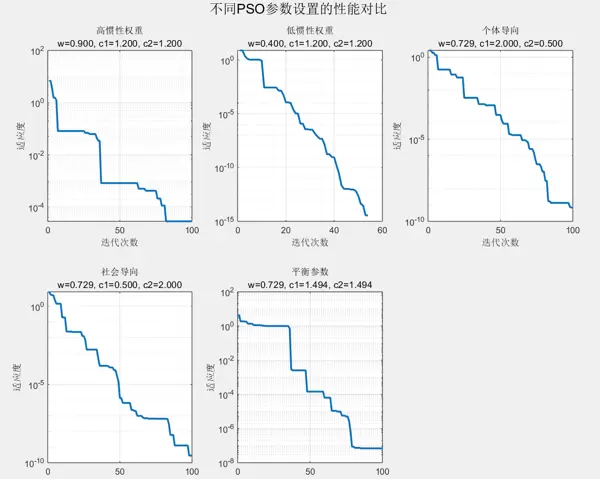
参数对比图: 揭示了不同参数设置对算法性能的影响:
- 高惯性权重收敛慢但探索能力强
- 低惯性权重收敛快但可能陷入局部最优
- 平衡的参数设置能在探索和开发间取得最佳平衡
PSO算法已成功应用于:
- 电力系统优化:机组组合、负荷分配
- 神经网络训练:权重优化,避免梯度消失
- 机器人路径规划:在多障碍环境中寻找最优路径
- 图像处理:图像分割参数优化
粒子群算法体现了个体与集体的辩证统一。每个粒子既保持个性(个体认知),又融入集体(社会认知),这种平衡正是算法成功的关键。如同人类社会的发展,个人创新与集体智慧的有机结合推动着文明进步。
从鸟群飞舞的自然现象到数学模型的精妙构建,粒子群算法向我们展示了简单规则如何涌现出复杂的智能。
这一奇妙的过程揭示了一个道理:最优雅的解决方案通常源自对自然界的深刻洞察。
在当今人工智能迅速发展的背景下,PSO算法依然在优化领域中占据重要地位。它启示我们,技术的最高追求不在于征服自然,而在于从自然中学习,用计算机语言重新诠释那些古老而永恒的智慧。
PSO算法就像鸟群一样,在数据的天空中借助数学的力量,翱翔并寻找最佳解决方案。

 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏




