系统总体设计
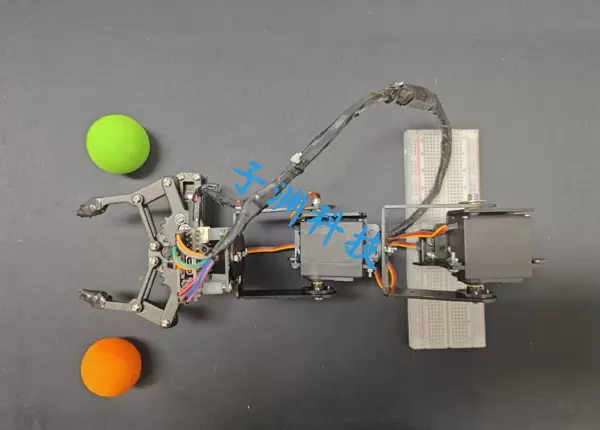
本设计采用STM32F4/H7系列单片机与OpenMV视觉模块相结合,构建了一套具备四自由度的智能视觉分拣机械臂系统。该装置通过机器视觉技术实现对不同颜色目标物体的自动识别,并基于识别结果完成精准抓取与分类放置,适用于自动化产线、物流分拣及智能仓储等多种工业场景,具备高效性、准确性与智能化特点。
核心功能实现
机器视觉识别:利用OpenMV摄像头实时采集图像信息,系统可对预设颜色的目标进行检测与空间定位,确保后续动作的精确执行。
自动抓取操作:在目标被成功识别并定位后,机械臂根据坐标数据自主规划运动路径,完成稳定且准确的抓取动作。
自动分类放置:依据预先设定的分拣规则,机械臂将抓取的物品运送至指定区域,实现全流程自动化分拣。
扩展功能模块
图传功能:集成无线图传模块后,用户可通过手机浏览器访问网页端,实时查看OpenMV摄像头拍摄的画面,便于远程监控运行状态。
LCD显示功能:系统配备LCD显示屏,用于本地展示摄像头捕获的实时影像,提升操作过程中的可视化程度。
手势识别控制:引入手势识别算法,使OpenMV能够识别人体手势指令,进而控制机械臂启停或执行特定动作,增强人机交互体验与操控灵活性。
硬件架构组成
STM32F4/H7单片机:作为主控单元,负责接收并处理来自OpenMV的视觉数据,协调各舵机运动,实现整体系统的逻辑控制与任务调度。
OpenMV摄像头:承担图像采集与颜色识别任务,具备较强的嵌入式图像处理能力,可输出目标物体的中心坐标信息。
四自由度机械臂:由多个高精度舵机构成,支持多角度联动,具备足够的活动范围和操作灵活性,满足复杂工况下的分拣需求。
相关资源链接
【?基于STM32机器视觉的分拣机械臂系统设计】https://www.bilibili.com/video/BV1ZuKLeCEvn
开发支持与服务内容
完整开发资料:提供包含详细源码、注释说明、电路原理图、程序流程图以及元器件清单在内的全套技术文档,助力开发者快速掌握项目结构并开展二次开发。
技术支持与培训:提供从硬件组装到软件调试的全过程指导服务,包括代码解析、故障排查与功能优化建议,保障系统顺利部署。
定制化解决方案:可根据实际应用场景,提供定制化的机械臂结构、OpenMV参数配置,以及软硬件功能扩展服务。
项目配套服务
实物定制服务:支持按需定制机械臂本体、摄像头模组及其他传感器组件,满足个性化或工业级应用要求。
教学与调试支持:配套完整的教学视频与文档资料,覆盖安装、接线、烧录、调试等环节,辅助用户独立完成系统搭建。
免费方案设计:提供免费的控制系统方案设计及配套调试工具软件,帮助用户高效实现自动化功能落地。
总结
该项目融合了STM32高性能控制平台与OpenMV先进的机器视觉能力,打造了一款具备四自由度运动能力的智能分拣机械臂。其在生产自动化、智能仓储等领域展现出良好的应用前景。系统不仅具备高度的稳定性与可扩展性,还可根据具体需求进行灵活调整与功能升级。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





