前言
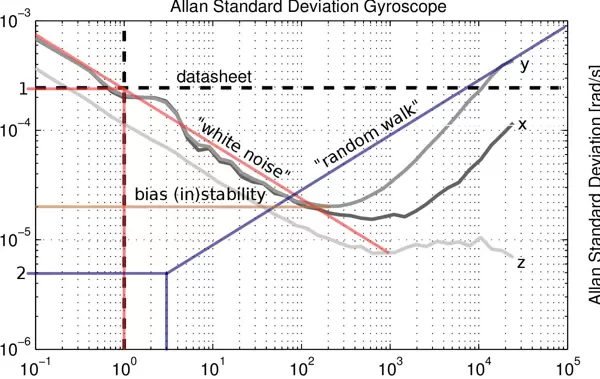
Allan方差由美国国家标准局的David Allan在20世纪60年代提出,最初用于分析振荡器的频率稳定性。该方法具备良好的统计特性辨识能力,能够有效区分多种误差源。在惯性器件领域,Allan方差被广泛应用于陀螺仪的噪声分析,可识别五类典型误差:量化噪声、角度随机游走(角速率白噪声)、零偏不稳定性、角速率随机游走(角加速度白噪声)以及速率斜坡(角速率趋势项)。
一、Allan方差的基本原理
假设以固定采样间隔 τ 对陀螺输出的角速率数据进行采集,共获得 N 个样本点。将这些数据划分为 K 组,每组包含 m 个连续采样值,即:
ω, ω, ..., ω (第1组),...,ωNm+1, ωNm+2, ..., ωN (第K组)
此时,相关时间定义为 τ = mτ。每一组的平均角速率可表示为:
Ωk = (1/m) Σmi=1 ω(k1)m+i,其中 k = 1, 2, ..., K
经典Allan方差的表达式如下:
σA(τ) = 1/[2(K1)] ΣK1k=1 (Ωk+1 Ωk)
其中符号 表示总体均值操作。通过改变相关时间 τ 的大小,可以获得不同尺度下的方差估计,进而绘制出 σA(τ) 随 τ 变化的曲线,其双对数坐标图即为Allan方差图。
从理论角度看,Allan方差是一种基于时域的随机过程分析工具。但由于实际中只能获取有限长度的数据序列,因此该方法本质上是对真实方差的一种估计,具有一定的统计偏差。研究指出,Allan标准差估计值 σA(τ) 的相对均方误差可近似为:
EA(τ) = |σA(τ) σA(τ)| / σA(τ) ≈ 1/√[2(N/m 1)] × 100%
其中 N 为总采样数,N/m 即为分组数量。由此可见,当分组数减少时,估计误差增大,因此需在分辨率与精度之间权衡。
二、动态Allan方差的核心思想
传统Allan方差适用于平稳信号的分析,但在实际应用中,陀螺信号常因环境扰动而表现出非平稳特性,其误差成分可能随时间发生显著变化。为此,动态Allan方差(DAVAR)被提出以应对这一挑战。
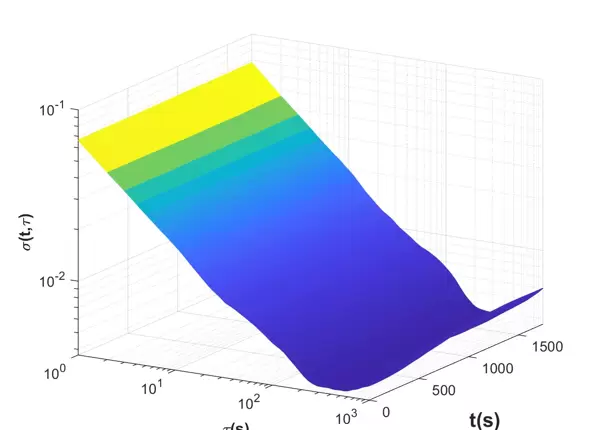
其核心思路是:将整个信号分割为多个时间窗口,在每个窗口内独立计算Allan方差,最终将所有结果整合成一个三维图谱——两个横轴分别为时间与相关时间 τ,纵轴为方差值。这样不仅保留了传统Allan分析的多尺度特性,还引入了时间维度,使误差行为的时变特征得以可视化呈现。
三、快速DAVAR的实现原理
3.1 递归算法设计
为了提升计算效率,快速DAVAR采用递归方式更新各时间段内的均值和方差,避免重复遍历数据。通过对前一状态的结果进行迭代修正,大幅降低运算复杂度,特别适合处理长序列数据。
3.2 相关时间选择策略
在计算过程中,并非所有相关时间都需要参与运算。通常选取满足 τ = n×τ 的离散值集合,且遵循对数分布规律(如每倍频程取若干点),以保证在宽时间范围内有足够分辨率的同时控制计算量。
四、关键代码结构解析
4.1 快速动态Allan方差主函数
主函数负责整体流程调度:读取输入数据、划分滑动时间窗、调用子函数完成局部Allan方差计算,并组织输出三维结果矩阵。通过设置步长与窗口长度参数,实现时间-尺度-方差的立体映射。
4.2 子函数1:局部Allan方差计算模块
该模块针对某一时间窗口内的数据执行标准Allan方差运算。输入为一段角速率序列,输出为其在多个相关时间下的方差值。内部实现包括数据分组、均值序列生成及差分平方求和等步骤。
4.3 子函数2:递归均值与方差更新单元
用于支持高效滑动窗口处理。利用递推公式动态维护当前窗口的统计量,减少冗余计算,提高整体运行速度,尤其适用于实时或近实时分析场景。
总结
Allan方差作为惯性传感器误差建模的重要工具,能够有效分离多种噪声类型。而动态Allan方差进一步拓展了其适用范围,使其可用于非平稳信号分析。结合快速算法与合理的时间尺度选择策略,可在保证精度的前提下显著提升计算效率,适用于工程实践中对长时间运行陀螺性能的监测与评估。
以光纤陀螺为例,其输出通常表现为角增量形式。因此,Allan方差可采用角增量的形式进行表达:
σA2(τ) = (1/2)(Ωk+m Ωk)2 = 1/(2mτ) × 1/(N2m) × ∑n=0N2m1 [θ[n+2m] 2θ[n+m] + θ[n]]
其中,θ[n] 表示在第 n 个时刻所测得的角度值。
DAVAR(动态Allan方差)的定义如下:针对具有时变特性的随机信号 θ(t),可在不同时间段内重复估计其Allan方差。具体而言,在时间点 t 处,利用长度为 Nw 的矩形窗对信号 θ(t) 进行截断,并计算该片段的Allan方差。通过在每个时间点 t 上执行相同操作,并汇总所有区间内的Allan方差结果,即可获得完整的DAVAR表示。
Allan方差通过绘制 σA2(τ) 与相关时间 τ 的二维关系曲线来描述信号的误差特性;而DAVAR则引入时间维度 t,构建出一个关于时间 t 和相关时间 τ 的三维图形,从而反映随机信号误差随时间演变的特征。因此,DAVAR可被定义为一组随时间变化的Allan方差曲线簇:
σA2[n, m] = 1/(2mτ) × 1/(Nw2m) × ∑k = nNw/2n+Nw/22m1 [θ[k+2m] 2θ[k+m] + θ[k]]
式中,Nw 表示所选滑动窗口的长度,m 取值范围为 m = 1, 2, ..., Nw/2 1。
三、快速DAVAR的原理
DAVAR是一种基于逐点计算Allan方差的方法,用于定性分析信号中各类误差成分随时间的变化情况。由于需要在多个时间点上重复计算Allan方差,传统方法存在数据处理量大、运算效率低等问题。为此,本文介绍两种加速计算的策略,其中第二种方法尤其适用于Allan方差的高效求解,实际应用效果显著。
3.1 递归算法
DAVAR的核心思想是将长度为 Nw 的矩形窗沿信号 θ(t) 滑动,每次移动一个采样点。值得注意的是,相邻两个窗口之间有 (Nw1) 个数据点是重叠的。这意味着当前时刻的Allan方差可以在前一时刻计算结果的基础上进行更新,而无需完全重新计算。
为此,可将DAVAR公式重写为以下形式:
σA2[n, m] = 1/(2mτ) × 1/(Nw2m) × ∑k = nNw/2n+Nw/22m1 Δm2[k]
其中,Δm[k] = θ[k+2m] 2θ[k+m] + θ[k],表示二阶差分项。
定义差分序列如下:
Δ[k] = θ[k + 2m] 2θ[k + m] + θ[k]
基于此,下一时刻的动态Allan方差(DAVAR)可表示为:
σ[n + 1, m] = (1 / (2mτ)) × (1 / (Nw 2m)) × [∑k = n Nw/2n + Nw/2 2m 1 Δ[k] + Δ[n + Nw/2 2m] Δ[n Nw/2]]
由上述表达式可进一步推导出递归形式的计算公式:
σ[n + 1, m] = σ[n, m] + (1 / (2mτ)) × (1 / (Nw 2m)) × (Δ[n + Nw/2 2m] Δ[n Nw/2])
由此可见,在从时间点 n 更新至 n+1 的过程中,只需在原有 σ[n, m] 的基础上,减去旧采样点 θ[n Nw/2] 对应的贡献项,并加入新进入窗口的采样点 θ[n + Nw/2 2m] 所带来的增量。该方法避免了重复全量计算,显著降低了 DAVAR 的运算复杂度。
关于相关时间 τ 的选取策略,通常设定为 τ = mτ,即在原始线性尺度下等间隔采样。然而,由于 Allan 方差图常采用双对数坐标(log-log),若 τ 仍保持线性分布,则在对数轴上其分布将变得密集,尤其在大 τ 区间内,导致计算资源浪费且对图形趋势描绘贡献有限。
考虑到 DAVAR 主要用于定性分析信号随时间变化的趋势,在不牺牲估计精度的前提下,可优化 τ 序列的选择方式,使其在对数域中近似均匀分布,从而减少不必要的计算量。
为此,引入指数函数构造 τ 序列:
τ(i) = τcon × τgi1,其中 i = 1, 2, 3, …
当 τg 固定时,随着 i 线性增长,τ(i) 在对数坐标系中呈现均匀分布特性。结合 Allan 方差的精度要求,设定估计误差不超过 25%,根据误差分析理论,需满足最小分组数条件:N / mmax ≥ 9,其中 mmax 表示最大延迟因子对应每组的样本数量。
由此可得最大相关时间约束:
τmax = mmaxτ ≤ Nτ / 9
代入具体参数:N = 10000,τcon = 1,i = 100,τ = 1s,解得 τg ≈ 1.073。该比值确保了 τ 序列在对数空间中的合理分布,兼顾计算效率与分析精度。
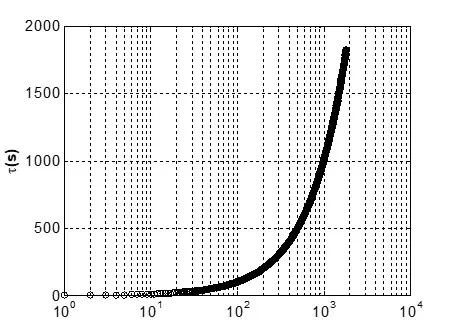
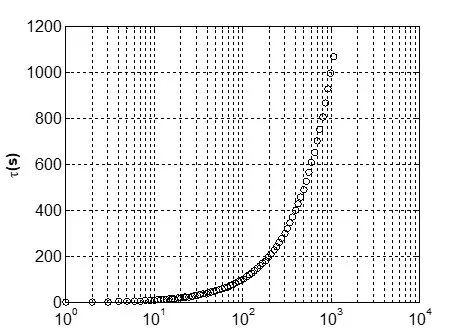
在对数坐标系中,序列
τ(i) = 1.073i1(其中 i = 1, 2, 3, …, 99)
的分布情况如下图所示。可以看出,相关时间 τ 在对数尺度下呈现出较为均匀的分布特性。这种均匀性显著减少了 Allan 方差计算过程中的运算负担,尤其对于需要处理多组动态 Allan 方差(DAVAR)的应用场景,整体计算效率得以大幅提升。
四、相关代码实现
4.1 快速动态 Allan 算法主程序
tic
clear all
close all
h = waitbar(0, '正在运行->>>>>>');
N = 5555;
Half = floor(N / 2);
tau0 = 1;
flag = 1;
source = load('D:\XXX');
X = source.data;
nnn = length(X);
x = cumsum(X(1:nnn-1)');
t = 1:nnn-1;
Nx = length(x);
Nt = length(t);
if ~mod(N, 2)
error('N must be odd');
end
% 参数初始化
Kmin = 5; % 最小分组数量
i_max = 100;
temp_tau1 = zeros(i_max, 1);
Tr = nthroot(N / Kmin, i_max - 1); % 计算根值
for i = 1:i_max
temp_tau1(i) = floor(tau0 * Tr^(i - 1));
end
temp_tau2 = zeros(i_max, 1);
j = 1;
temp_tau2(1) = temp_tau1(1);
for i = 2:i_max
if temp_tau1(i) ~= temp_tau1(i-1)
j = j + 1;
temp_tau2(j) = temp_tau1(i);
end
end
nn = j;
tau = zeros(nn, 1);
for i = 1:nn
tau(i) = temp_tau2(i); % 确定最终的时间间隔序列
end
% 初始化输出变量
min2 = zeros(nn, 1);
max2 = zeros(nn, 1);
sigma2 = zeros(nn, 1);
S = zeros(nn, Nt - N);
% 滑动窗口计算 Allan 方差
for n = Half + 1 : Nt - Half
xN = x(n - Half : n + Half);
if (n - Half) == 1
[S(:, n - Half), sigma2, min2] = allan_use_for_fast_fast(xN, tau);
else
next_sigma2 = sigma2;
next_min2 = min2;
[S(:, n - Half), sigma2, min2] = allan_fast_fast(xN, next_sigma2, next_min2, tau);
end
waitbar((n - Half) / (Nt - N), h);
end
% 可视化结果
if flag && Nt > 1
figure;
mesh(t(Half+1:Nt-Half)-2778, tau, S);
set(gca, 'YDir', 'reverse', 'YScale', 'log', 'ZScale', 'log');
V = [0, 1744, 0, 1000, 3.706317630769962e-003, 0.1];
axis(V);
xlabel('t(s)', 'fontweight', 'bold'); set(get(gca,'Xlabel'), 'FontSize', 12);
ylabel('\tau(s)', 'fontweight', 'bold'); set(get(gca,'Ylabel'), 'FontSize', 14);
zlabel('\sigma(t,\tau)', 'fontweight', 'bold'); set(get(gca,'Zlabel'), 'FontSize', 14);
hidden off;
view(-73, 28);
close(h);
end
figure;
plot(X(Half+1:Nt-Half)); grid on;
set(gca, 'FontSize', 12);
xlabel('time(s)', 'fontweight', 'bold'); set(get(gca,'Xlabel'), 'FontSize', 12);
ylabel('random error((°)/h)', 'fontweight', 'bold'); set(get(gca,'Ylabel'), 'FontSize', 12);
toc
4.2 子函数一:Allan 偏差基础计算函数
该子函数用于初始状态下的 Allan 偏差计算,主要完成累加和统计量的初始化工作。
% Allan Deviation
function [sigma, temp_sigma2, temp_min2] = allan_use_for_fast_fast(x, tau)
N = length(x);
taumax = length(tau);
temp_sigma2 = zeros(taumax, 1);
sigma = zeros(taumax, 1);
temp_min2 = zeros(taumax, 1);
for k = 1:taumax
n = 1;
temp_min2(k) = (x(n + 2*tau(k)) - 2*x(n + tau(k)) + x(n))^2;
for n = 1:N - 2*tau(k)
temp_sigma2(k) = temp_sigma2(k) + (x(n + 2*tau(k)) - 2*x(n + tau(k)) + x(n))^2;
end
temp_sigma2(k) = 1/(2*tau(k)^2) * 1/(N - 2*tau(k)) * temp_sigma2(k);
temp_min2(k) = 1/(2*tau(k)^2) * 1/(N - 2*tau(k)) * temp_min2(k);
sigma(k) = sqrt(temp_sigma2(k));
end
sigma = sigma';
4.3 子函数2
function [sigma, temp_sigma2, temp_min2] = allan_fast_fast(x, sigma2, min2, tau)
N = length(x);
taumax = length(tau);
temp_min2 = zeros(taumax, 1);
max2 = zeros(taumax, 1);
sigma = zeros(taumax, 1);
temp_sigma2 = zeros(taumax, 1);
for k = 1:taumax
n = 1;
temp_min2(k) = (x(n + 2*tau(k)) - 2*x(n + tau(k)) + x(n))^2;
n = N - 2*tau(k);
max2(k) = (x(n + 2*tau(k)) - 2*x(n + tau(k)) + x(n))^2;
temp_min2(k) = 1/(2*tau(k)^2) * 1/(N - 2*tau(k)) * temp_min2(k);
max2(k) = 1/(2*tau(k)^2) * 1/(N - 2*tau(k)) * max2(k);
temp_sigma2(k) = sigma2(k) - min2(k) + max2(k);
sigma(k) = sqrt(temp_sigma2(k));
end
sigma = sigma';
总结
DAVAR 方法在分析陀螺输出数据方面具有较强的直观性和有效性,能够有效识别并分离信号中包含的主要随机误差成分,从而对陀螺仪的性能进行客观评估。然而,由于该方法需要对信号在各个时间点上的 Allan 方差进行估计,导致整体计算量较大,运算耗时较长。
为解决这一问题,本文引入了递推算法以及基于选择特定相关时间的优化策略,显著提升了计算效率,大幅缩短了 DAVAR 的运算时间。这种改进后的方案在处理大规模数据时表现优异,同时适用于计算资源和电源受限的移动设备,具备良好的应用潜力与推广价值。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





