1、灰度直方图
灰度直方图是一种用于统计图像中各灰度级别像素数量的图表。通过分析其分布形态,可以快速了解图像的亮度水平、对比度强弱以及曝光是否合理,为后续的图像增强提供参考依据。
一个灰度直方图可能对应多种不同的图像结构,即图像与直方图之间是多对一的关系。即使视觉上差异明显,只要灰度值的分布一致,它们的直方图就相同。
根据直方图的分布特征,可判断图像状态并采取相应处理措施:
- 分布狭窄且集中:说明图像对比度较低(整体偏灰),应进行对比度扩展。
- 集中在左侧(低灰度区):图像整体偏暗,需提升亮度。
- 集中在右侧(高灰度区):图像过亮,应降低亮度。
在直方图中,横轴(x轴)表示灰度等级,纵轴(y轴)表示具有该灰度级的像素总数。所有灰度级对应的像素数之和即为直方图的总面积,也等于图像总的像素个数。因此,直方图面积 = 图像总像素数。对该面积沿横轴积分即可得出结果。

平均灰度反映了图像的整体亮度水平。平均值越高,图像越明亮;反之则越暗。

标准差则体现灰度值的离散程度。标准差越大,说明灰度分布越广,图像的对比度也越高。
需要注意的是,直方图属于全局性统计指标,仅关注某一灰度值出现的频率,而不考虑这些像素在图像中的空间位置。因此,它无法反映物体形状、纹理细节或边缘信息。
尽管不同图像在视觉上可能存在显著差异,但只要它们的灰度值数量分布相同,其直方图就会完全一致。
2、二值化处理
二值化是指将图像中所有像素转换为两个数值,通常为0(黑)和255(白),从而区分前景与背景。实现这一过程需要设定一个阈值T:
- 若像素灰度值 ≥ T,则设为255(白色,前景);
- 若像素灰度值 < T,则设为0(黑色,背景)。
为了获得最佳分割效果,需选取最优阈值T*,使得前景与背景分离最为清晰准确。为此发展出多种自动选阈算法。
【补充】许多图像的灰度直方图呈现双峰特性:一个峰值位于低灰度区域(对应暗部),另一个位于高灰度区域(对应亮部)。两峰之间的谷底常被视为前景与背景的过渡区域,最优阈值通常取自此谷底位置。
常见的阈值选择方法包括:
(1)全局固定阈值
手动设定阈值,如在8位图像中常用T=128。适用于光照均匀、前景与背景对比明显的场景。
(2)大津法(Otsu)
这是一种经典的自动选取全局阈值的方法。假设图像由前景和背景两类像素构成(即直方图呈双峰分布),通过遍历所有可能的阈值,寻找使类间方差最大(或类内方差最小)的那个灰度值作为最优阈值T。
(3)熵法(Entropy-based Method)
基于信息论原理,通过最大化前景与背景的信息熵来确定最佳分割阈值。
(4)Isodata算法
一种迭代式聚类方法,通过不断调整前景与背景的平均灰度值来逼近最优阈值,属于自适应阈值选择的典型代表之一。
3、直方图均衡化(HE)
直方图均衡化是一种自动增强图像对比度的技术。其核心思想是构建一个映射函数,将原始图像的灰度级重新分布,使得输出图像的直方图尽可能平坦(即均匀分布)。
该方法利用累积分布函数(CDF)对图像进行非线性拉伸,将像素密集的灰度区间展开,稀疏区间压缩,从而有效提升整体对比度。
经过直方图均衡化处理后,图像的灰度分布更加均匀,视觉细节更清晰,同时提高了幅度分辨率。
4、直方图规定化
与均衡化不同,直方图规定化的目标不是让直方图变均匀,而是将其调整为某个预设的目标分布形式。这种方法可以避免因过度拉伸而导致的对比度过强问题。
简而言之,直方图均衡化追求“均匀”,而规定化追求“可控”——使图像直方图匹配特定模板或参考图像的分布。
两者均属于直方图变换技术范畴。为实现从源图像到目标分布的转换,常用两种灰度映射策略:
(1)单映射规则(SML)
采用一对一的直接映射方式,计算简单直观,属于正向映射方法。
(2)组映射规则(GML)
采用多对一映射机制,将输入图像的一段连续灰度范围映射至参考图像的一个灰度级。理论上,GML比SML更优,被认为是更接近理想解的方法。
(3)误差比较
一般情况下,GML的映射误差小于或等于SML。但在某些特殊条件下二者误差相等。具体而言:
- 当原始图像与目标图像的灰度级数相等(M = N)时,SML与GML误差相同;
- 当原始灰度级数大于目标(M > N)时,SML误差必然更大。
图像运算
1、基本几何变换
由于图像像素以坐标(x, y)表示,因此图像变换可视为对这些坐标的数学操作。其中平移是最基础的一种变换形式。
(x',y')= ? ( x ± t , y ±? t)
旋转
x' = x·cosθ - y·sinθ;y' = x·sinθ + y·cosθ
缩放
(x', y') = (s_x · x, s_y · y)
翻转
水平镜像:
x' = -x
垂直镜像:
y' = -y
算术与逻辑运算
(1)算术运算(结果通常为灰度值)
- 加法:C(x,y) = A(x,y) + B(x,y)。常用于图像平均以降低噪声,或实现图像融合。
- 减法:C(x,y) = |A(x,y) - B(x,y)|,取绝对值。适用于运动检测、背景消除以及差异分析等场景。
- 乘法/除法:多用于局部增强或校正操作,例如遮罩处理、阴影补偿等。
(2)逻辑运算(通常作用于二值图像或位平面)
- 与(AND):提取两个图像的共同区域,常用于掩模操作。
- 或(OR):合并不同区域,形成联合区域。
- 非(NOT):对像素值进行反转,获取补集。
- 异或(XOR):识别两幅图像之间的差异部分。
像素间的基本关系与定义
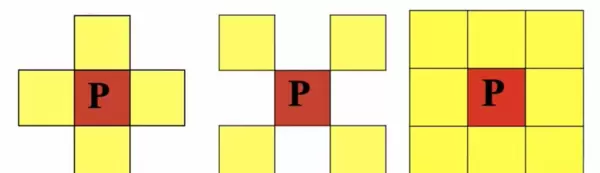
(1)邻域与邻接
4-邻域(N(p)):指像素 p 的上下左右四个直接相邻的像素点。
对角邻域(N_D(p)):指像素 p 的四个对角方向上的像素。
8-邻域(N(p)):包含周围全部八个邻近像素。
N?(p) ∪ N_D(p)
如下图所示:
当两个像素在空间上相邻时,可根据特定规则判断其是否构成邻接关系:
- 4-邻接:若像素 q 位于像素 p 的4-邻域内,则二者为4-邻接。
- 8-邻接:若 q 在 p 的8-邻域中,则为8-邻接。
- m-邻接(混合邻接):为避免8-邻接带来的连接歧义(如通过角点穿越缝隙),引入该概念。满足以下任一条件即为m-邻接:
- q 属于 p 的4-邻域;
- q 位于 p 的对角位置,且 p 与 q 的4-邻域之间无交集。
关于 m-邻接的进一步说明:需预先定义一个像素值集合 V。例如,在二值图像中设 V = {1},则所有值为1的像素属于该集合。当两个像素 p 和 q 满足:
- 处于4-邻域内,或者
- 处于对角位置,并且它们各自的4-邻域中没有共同属于集合 V 的像素,
则认为 p 和 q 构成 m-邻接。
示例对比:
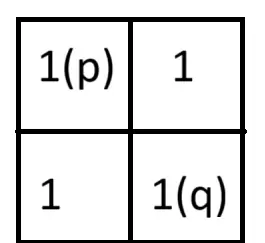
左图中,p 与 q 的4-邻域存在值为1的像素(属于V),因此不满足 m-邻接条件。
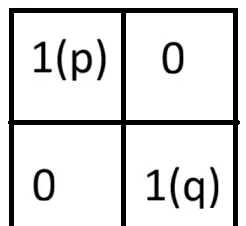
右图中,相应邻域内无属于 V 的像素,故满足 m-邻接。
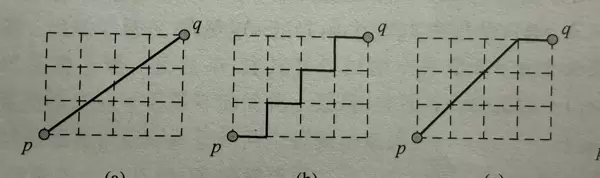
(2)像素间的距离度量
欧几里得距离(欧式距离):表示两点之间的直线距离,计算方式为两点坐标差的平方和再开方。

城区距离:仅允许沿水平或垂直方向移动,对应于4-邻接结构。其值等于从点 p 到 q 所需的最小步数(单位步长)。

棋盘距离:允许水平、垂直及对角移动,对应8-邻接模式。代表从点 p 到 q 所需的最少移动次数(每步可走一格,包括斜向)。

距离示意图如下:
关于模板运算中的卷积与滤波技术,将在后续内容中详细讲解。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





