在汽车技术快速演进的背景下,线控转向系统正逐步成为智能驾驶与车辆控制领域的重要研究方向。本文将介绍一种基于 Carsim 与 Simulink 联合仿真的线控转向建模方法,涵盖关键模块构建、参数配置及仿真集成等内容。
1. 系统模型构成
转向电机建模
作为线控转向系统的执行核心,转向电机负责将电能转化为机械转矩。在 Simulink 环境中,通常依据直流电机的工作原理建立其动态数学模型。该模型可由以下微分方程组描述:
\[
\begin{cases}
U = Ri + L\frac{di}{dt} + e_b \\
e_b = k_e\omega \\
T = k_t i \\
J\frac{d\omega}{dt} = T - T_{load}
\end{cases}
\]
其中,$U$ 表示输入电压,$R$ 和 $L$ 分别为电枢回路的电阻与电感,$i$ 为电流,$e_b$ 是反电动势,$k_e$ 为反电动势常数,$\omega$ 代表角速度,$T$ 为电磁转矩,$k_t$ 为转矩系数,$J$ 为转动惯量,$T_{load}$ 则是外部负载转矩。
借助 Simscape Electrical 工具箱,可以在 Simulink 中搭建高保真的电机仿真模块。通过调整 $R$、$L$、$k_e$、$k_t$ 和 $J$ 等参数,实现对不同类型电机特性的模拟。
齿轮齿条传动机构
该部件的作用是将电机输出的旋转运动转换为齿条的直线位移,从而驱动车轮偏转。在 Carsim 中进行建模时,需设定如齿轮传动比、齿条刚度等关键参数。
例如,在 Carsim 的配置文件中,齿轮比参数可能以如下形式出现:
Gear_Ratio = 16.5; % 设置齿轮比为 16.5
此参数直接决定了电机每转动一定角度时齿条的移动距离,进而影响前轮的转向角响应特性。
转向执行机构动力学模型
执行机构承担着传递并调节转向力矩的功能,其性能直接影响操控手感与系统响应。以电动助力转向(EPS)结构为例,助力大小通常与车速和方向盘输入转矩相关。
可通过编写 MATLAB 函数实现助力特性曲线的建模,如下所示:
function assistTorque = assistCharacteristics(vehicleSpeed, steeringTorque)
% 这里简单假设一个线性的助力特性
if vehicleSpeed < 30 % 车速小于 30km/h
assistTorque = 0.8 * steeringTorque;
else
assistTorque = 0.5 * steeringTorque;
end
end
该函数根据实时车速动态调整助力转矩,确保低速时转向轻便、高速时稳定可靠。
2. Carsim 参数配置说明
Carsim 的参数文件包含了整车多方面的物理属性,包括几何尺寸、悬架特性以及转向系统参数等。针对线控转向仿真,重点需要配置与转向相关的参数项,除齿轮比外,还包括转向系统的阻尼系数、回正力矩特性等。
Steering_Damping = 5.0; % 转向系统阻尼系数
Returning_Moment = 3.0; % 回正力矩
这些参数的精确设定对于还原真实工况下的系统行为具有决定性作用,是保证仿真结果可信度的基础。
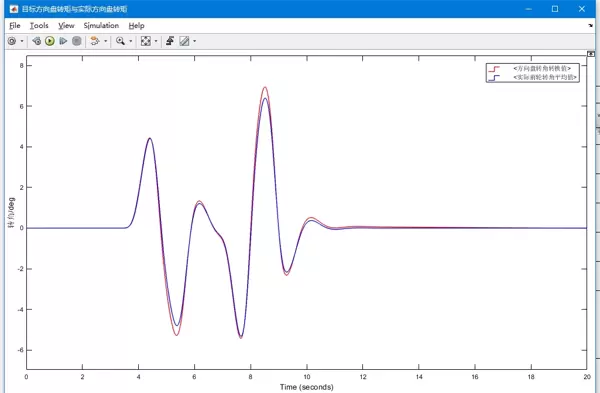
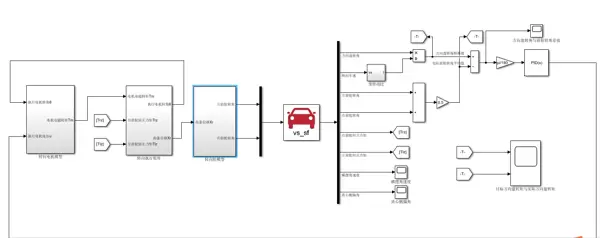
3. Simulink 仿真架构设计
Simulink 模型在整个联合仿真流程中处于中枢地位,集成了电机控制逻辑、执行机构动力学以及与 Carsim 的数据交互接口。
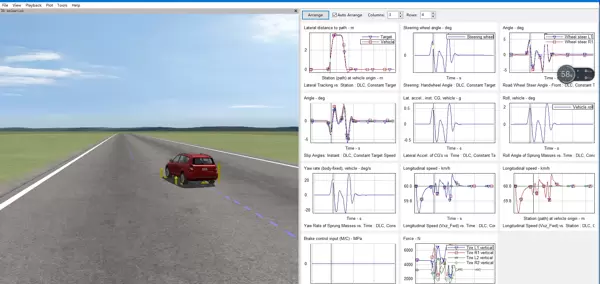
各子模块之间通过信号线连接:电机模型输出的转矩信号送入执行机构模块;执行机构计算出的齿条位移或转角信息则经由 co-simulation 接口传入 Carsim,用于更新车辆当前的转向状态。
这种闭环结构支持对整个转向过程的动态追踪,能够有效评估控制算法的性能表现。
4. 参考资料与理论支撑
在开发过程中,参考权威文献和技术文档有助于提升模型准确性。例如,《汽车动力学》一书系统阐述了车辆转向系统的力学原理,为建模提供理论依据。
此外,MathWorks 官方提供的 Simulink 与 Simscape 使用手册,以及 MSC Software 发布的 Carsim 用户指南,均详细介绍了软件操作流程与联合仿真设置方法,是不可或缺的技术资源。
综上所述,利用 Carsim 与 Simulink 构建线控转向联合仿真平台,不仅能够高效验证控制策略,还能深入分析系统动态特性,为下一代智能转向技术的研发提供有力工具。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





