本文参考PCL官网等资料,供入门使用,结合个人理解整理而成,若有不当之处欢迎指正。
引言
学习 Point Cloud Library(PCL)时,初学者常遇到的第一个困惑并非复杂算法,而是无处不在的模板参数
PointT。
为什么不能像 Python 那样用一个通用点类型?为何要区分
PointXYZ、
PointXYZRGB 等多种类型?
本文将从 C++ 的泛型编程机制与内存对齐原理出发,深入剖析 PCL 的核心设计思想——
PointT 的本质。
一、PointT 的本质:效率与泛型的平衡
在 PCL 架构中,
PointT 是一个模板参数(Template Parameter)。
pcl::PointCloud 并非具体类,而是一个类模板(Class Template),相当于一个“模具”。只有当用户指定具体的
PointT 类型后,编译器才会生成对应的代码实例。
1.1 设计动机:为何采用模板?
PCL 的设计理念是“零开销抽象”(Zero-overhead principle)。
- 不使用模板的代价:若定义一个包含 XYZ、RGB、法线、强度、曲率等字段的“全能点结构”,其大小可能超过 64 字节。即使仅进行简单几何运算,CPU 仍需加载全部数据,导致缓存命中率下降,带宽浪费严重。
- 使用模板的优势:根据不同的
PointT,编译器生成专用代码。例如处理 PointXYZ 时,每个点仅占 16 字节,可高效利用 CPU 的 SIMD(单指令多数据流)指令集加速计算。
二、官方标准 PointT 类型解析
PCL 在
pcl/impl/point_types.hpp 中预定义了多种点类型,掌握它们的内存布局至关重要。
2.1 基础几何点:pcl::PointXYZ
适用于配准、滤波等纯几何操作。
数据成员: x, y, z (均为 float)
内存大小: 16 字节(4 个 float)
内存布局图解:
| x | y | z | padding |
| 4B | 4B | 4B | 4B |
深度解析: 尽管 xyz 仅需 12 字节,但为了满足 SSE 指令集的内存对齐要求(128 位 = 16 字节对齐),PCL 添加了 4 字节填充(padding)。这种空间换时间的策略显著提升了向量化运算效率。
源码窥探(简化版):
struct PointXYZ {
union {
float data[4]; // 便于 SSE 指令批量操作
struct {
float x; float y; float z;
};
};
};
2.2 彩色点类型:pcl::PointXYZRGB
适用于 RGB-D 相机(如 Realsense、Kinect)采集的数据,融合几何与色彩信息。
数据成员: x, y, z, rgb (float)
内存大小: 32 字节
内存布局图解:
| x | y | z | padding | rgb | padding | padding | padding |
| 4B | 4B | 4B | 4B | 4B | 4B | 4B | 4B |
深度解析(RGB 打包机制):
rgb 字段并非三个独立浮点数,而是一个被
reinterpret_cast 包装的 float,底层实际存储为
uint32_t。R、G、B 各占 8 位,共 24 位,剩余 8 位通常置零。因此需通过
point.r、
point.g、
point.b 访问颜色分量,不可直接修改 float 值。
2.3 激光雷达点:pcl::PointXYZI
广泛用于自动驾驶与测绘领域,“I” 表示反射强度(Intensity)。
数据成员: x, y, z, intensity (float)
内存大小: 32 字节
说明: 虽然逻辑上只需 16 字节(x, y, z, intensity 各 4 字节),但为兼容 Eigen 库的向量化运算,PCL 采用 16 字节分块对齐策略。前 16 字节存放 xyz,后 16 字节存放 intensity 和 padding,总计占用 32 字节。
此外,PCL 还提供其他多种标准点类型,可根据需要自行查阅文档。
三、进阶应用:自定义 PointT 类型
尽管官方类型覆盖了绝大多数场景,但在特定需求下仍需扩展。
案例: 实现“热成像点云”,每个点除坐标外还需记录温度(temperature)。
可通过 PCL 提供的宏机制完成点类型的注册与使用。
步骤 1:定义结构体
#define PCL_NO_PRECOMPILE // 必须添加,告诉 PCL 我们要用自定义类型
#include <pcl/pcl_macros.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
struct PointWithTemp
{
PCL_ADD_POINT4D; // 1. 自动添加 x, y, z 和 padding
float temperature; // 2. 添加你的自定义字段
EIGEN_MAKE_ALIGNED_OPERATOR_NEW // 3. 确保内存对齐(非常重要)
} EIGEN_ALIGN16; // 4. 强制 16 字节对齐
步骤 2:注册点类型
// 告诉 PCL:这个结构体里,x,y,z 是坐标,temperature 是我们要用的其他属性
POINT_CLOUD_REGISTER_POINT_STRUCT (PointWithTemp,
(float, x, x)
(float, y, y)
(float, z, z)
(float, temperature, temperature)
)
步骤 3:按标准方式使用
int main() {
pcl::PointCloud<PointWithTemp>::Ptr cloud(new pcl::PointCloud<PointWithTemp>);
PointWithTemp p;
p.x = 1.0; p.y = 2.0; p.z = 3.0;
p.temperature = 36.5;
cloud->push_back(p);
// 甚至可以保存为 PCD 文件,PCL 会自动把字段名写进文件头
pcl::io::savePCDFileASCII("temp_cloud.pcd", *cloud);
}
完整代码示例:
// [重要] 定义自定义点类型前,必须定义这个宏,否则会报错
#define PCL_NO_PRECOMPILE
#include <iostream>
#include <vector>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
// 第一部分:定义一个自定义 PointT (MyPoint),假设我们需要一个点,
// 除了坐标,还有一个 "voltage" (电压) 属性
struct MyPoint
{
// 1. 使用 PCL 宏自动添加 x, y, z 和 padding (对齐用)
PCL_ADD_POINT4D;
// 2. 添加我们自己的数据
float voltage;
// 3. 确保内存对齐 (Eigen 库要求)
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16; // 强制 16 字节对齐
// 4. 向 PCL 注册这个新类型
// 语法:(结构体名, (字段类型, 字段名, 引用名)...)
POINT_CLOUD_REGISTER_POINT_STRUCT(MyPoint,
(float, x, x)
(float, y, y)
(float, z, z)
(float, voltage, voltage)
)
template <typename PointT>
void printPointCoordinates(const PointT& p, std::string name) {
std::cout << "[" << name << "] x=" << p.x << ", y=" << p.y << ", z=" << p.z << std::endl;
}
int main()
{
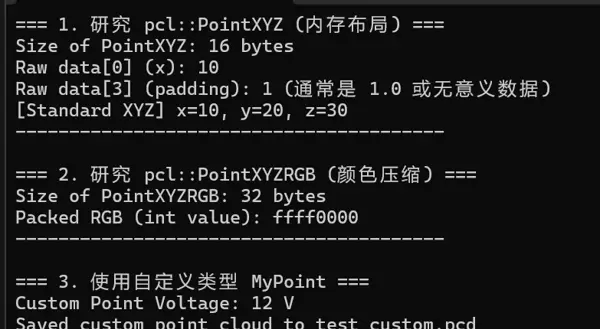
std::cout << "=== 1. 研究 pcl::PointXYZ (内存布局) ===" << std::endl;
pcl::PointXYZ p_xyz;
p_xyz.x = 10.0;
p_xyz.y = 20.0;
p_xyz.z = 30.0;
// 验证 sizeof:应该是 16 字节 (4 float),而不是 12 字节
std::cout << "Size of PointXYZ: " << sizeof(p_xyz) << " bytes" << std::endl;
// 访问底层的 data 数组 (Union 结构)
std::cout << "Raw data[0] (x): " << p_xyz.data[0] << std::endl;
std::cout << "Raw data[3] (padding): " << p_xyz.data[3] << " (通常是 1.0 或无意义数据)" << std::endl;
printPointCoordinates(p_xyz, "Standard XYZ");
std::cout << "----------------------------------------\n" << std::endl;
std::cout << "=== 2. 研究 pcl::PointXYZRGB (颜色压缩) ===" << std::endl;
pcl::PointXYZRGB p_rgb;
p_rgb.x = 1.0; p_rgb.y = 1.0; p_rgb.z = 1.0;
// 设置颜色:虽然看起来像分别设置成员,但底层是在操作位
p_rgb.r = 255; // 红
p_rgb.g = 0; // 绿
p_rgb.b = 0; // 蓝
// 验证 sizeof:应该是 32 字节 (16字节坐标 + 16字节颜色与填充)
std::cout << "Size of PointXYZRGB: " << sizeof(p_rgb) << " bytes" << std::endl;
// 这里的 rgb 实际上是一个 float,我们把它强转回 int 看看
// 这里展示了 PCL 是如何把 RGB 塞进一个数里的
uint32_t rgb_int = *reinterpret_cast<int*>(&p_rgb.rgb);
std::cout << "Packed RGB (int value): " << std::hex << rgb_int << std::dec << std::endl;
// 输出通常是 0x00FF0000 (Red 在高位) 或者类似的格式,取决于大小端模式
std::cout << "----------------------------------------\n" << std::endl;
std::cout << "=== 3. 使用自定义类型 MyPoint ===" << std::endl;
pcl::PointCloud<MyPoint> cloud_custom;
MyPoint p_custom;
p_custom.x = 5.5;
p_custom.y = 6.6;
p_custom.z = 7.7;
p_custom.voltage = 12.0;
cloud_custom.push_back(p_custom);
std::cout << "Custom Point Voltage: " << cloud_custom.points[0].voltage << " V" << std::endl;
pcl::io::savePCDFileASCII("test_custom.pcd", cloud_custom);
std::cout << "Saved custom point cloud to test_custom.pcd" << std::endl;
return 0;
}


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏





