经管之家App
让优质教育人人可得
立即打开


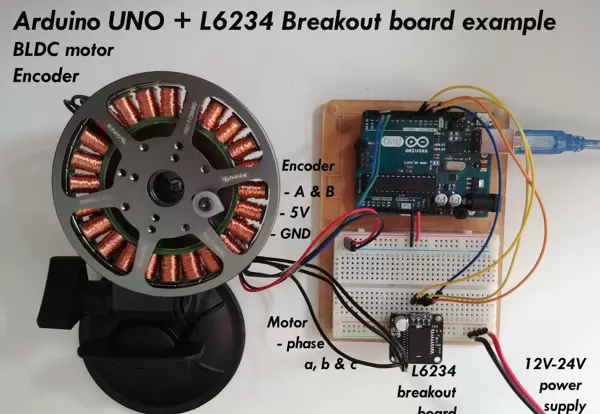
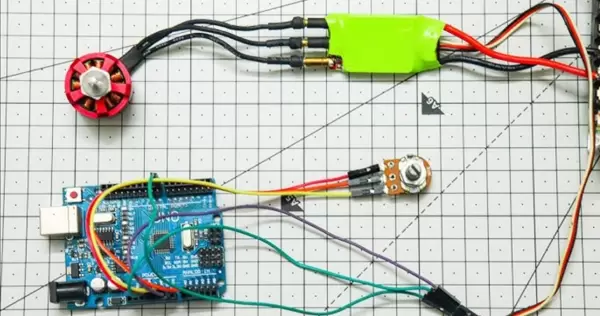
 在基于 Arduino 的无刷直流电机(BLDC)控制系统中,模糊神经网络混合控制器结合了模糊逻辑控制(FLC)与人工神经网络(ANN)的技术优势,形成一种适用于资源受限环境的智能控制方案。尽管 Arduino 硬件性能有限,但通过合理的算法简化与结构优化,仍可实现高效的轻量级控制。以下从其核心特性、适用场景及实施中的关键注意事项三个方面进行系统性分析。
在基于 Arduino 的无刷直流电机(BLDC)控制系统中,模糊神经网络混合控制器结合了模糊逻辑控制(FLC)与人工神经网络(ANN)的技术优势,形成一种适用于资源受限环境的智能控制方案。尽管 Arduino 硬件性能有限,但通过合理的算法简化与结构优化,仍可实现高效的轻量级控制。以下从其核心特性、适用场景及实施中的关键注意事项三个方面进行系统性分析。
 1、基于模糊PID的BLDC速度控制器示例(伪代码框架)
1、基于模糊PID的BLDC速度控制器示例(伪代码框架)
#include <Fuzzy.h>
// 初始化模糊控制器对象
Fuzzy *fuzzy = new Fuzzy();
// 设置输入输出变量、隶属度函数及规则库...
void setupFuzzy() {
FuzzySet *slow = new FuzzySet(0, 0, 10, 20);
// ... 其他隶属度函数
FuzzyInput *speedError = new FuzzyInput(1);
speedError->addFuzzySet(slow);
// ... 添加规则:如 IF error is slow THEN Kp is high, Ki is low
}
void loop() {
float targetSpeed = 100.0; // 设定目标转速值
float actualSpeed = readEncoder(); // 通过编码器获取当前实际转速
float error = targetSpeed - actualSpeed; // 计算速度误差
float errorChange = error - lastError; // 计算误差变化率
// 执行模糊推理过程
fuzzy->setInput(1, error); // 输入误差作为第一变量
fuzzy->setInput(2, errorChange); // 输入误差变化率作为第二变量
fuzzy->fuzzify(); // 进行模糊化处理
float Kp = fuzzy->defuzzify(1); // 去模糊化得到Kp参数
float Ki = fuzzy->defuzzify(2); // 去模糊化得到Ki参数
// 执行PID控制输出计算
float output = Kp * error + Ki * integral;
setPWM(output); // 将计算结果转化为PWM信号驱动电机
lastError = error; // 更新上一时刻误差用于下次计算
}
要点解读:
模糊化处理将精确的速度误差(e)与误差变化率(ec)转换为“负大”、“正小”等语言型模糊集合,提升对非线性动态的表达能力。
规则库构建依赖专家经验设定,例如“当误差为正且较大、误差变化趋势为负但较小时,应增大Kp并减小Ki”,实现智能决策。
该控制器具备实时参数调节能力,相较于传统固定增益PID,在面对负载突变时表现出更强的稳定性,有效抑制超调现象。
系统性能高度依赖于隶属度函数的设计形态及规则库的完整性,通常需要经过多轮实验调试以达到理想响应效果。
// 神经元PID核心算法
float neuronPID(float target, float actual) {
static float w1 = 0.5, w2 = 0.3, w3 = 0.2; // 初始化权重系数
float e = target - actual; // 当前位置误差
static float e_sum = 0; // 积分项累计
float e_diff = e - e_last; // 微分项,即误差变化率
e_sum += e; // 累加积分值
// 神经元模型输出:加权和作为控制量
float output = w1 * e + w2 * e_sum + w3 * e_diff;
// 使用有监督Hebb学习规则进行权重更新
float learningRate = 0.01;
w1 += learningRate * e * output;
w2 += learningRate * e_sum * output;
w3 += learningRate * e_diff * output;
e_last = e; // 保存本次误差供下一周期使用
return constrain(output, -255, 255); // 输出限幅,防止溢出
}
void loop() {
float targetAngle = 90.0; // 设定期望角度
float actualAngle = readEncoderAngle(); // 获取当前位置反馈
float pwm = neuronPID(targetAngle, actualAngle); // 调用神经元PID计算输出
setPWM(pwm); // 输出PWM控制信号
}
要点解读:
采用单神经元结构替代传统复杂神经网络,显著降低计算开销,适用于资源受限的嵌入式平台运行。
具备在线自学习机制,权重参数在系统运行过程中持续优化,赋予控制器初步的自适应调节能力。
采用增量式更新策略,有助于避免积分项饱和问题;同时需谨慎选择学习率,过大会导致系统发散,影响收敛性。
适用于非线性强度假设不高的控制系统,在面对工况变化时比固定参数PID展现出更优的鲁棒性和动态性能。
// 简化版FNN框架(实际应用中建议结合矩阵运算库实现)
struct FNN {
float layer1[3]; // 输入层:包含误差e、误差变化ec以及偏置常数项
float layer2[5]; // 隐含层:模拟模糊逻辑规则激活强度
float layer3[1]; // 输出层:生成最终扭矩补偿量
// 前向传播函数
float forward(float e, float ec) {
layer1[0] = e;
layer1[1] = ec;
layer1[2] = 1.0;
// 第一层到第二层:模拟模糊化过程,使用可训练的隶属函数参数
for(int i = 0; i < 5; i++) {
layer2[i] = sigmoid(layer1[0] * w1[i] + layer1[1] * w2[i] + layer1[2] * b1[i]);
}
// 第二层到第三层:模拟去模糊化过程
layer3[0] = 0.0;
for(int i = 0; i < 5; i++) {
layer3[0] += layer2[i] * w3[i];
}
return layer3[0]; // 返回扭矩补偿输出
}
// 反向传播训练接口(需提供期望输出目标)
void backward(float target) {
// ... 此处省略梯度推导细节,实际工程中需采集样本数据进行离线训练
}
};
要点解读:
模糊神经网络融合了模糊逻辑的可解释性与神经网络的学习能力,形成一种混合智能控制架构。
输入层接收原始控制误差及其变化率,并引入常数项用于偏差调节;隐含层对应模糊规则的激活程度,其节点数量与规则总数相关。
通过Sigmoid等激活函数模拟隶属度函数行为,使系统能够自动调整模糊边界,增强适应性。
输出层完成加权求和操作,近似实现重心法去模糊化,输出连续的扭矩补偿指令。
训练过程依赖反向传播算法优化连接权重,通常需借助外部工具完成离线学习后再部署至控制器,适合高精度要求的应用场景。
 FNN fnn;
void loop() {
// 读取传感器目标扭矩与估计实际扭矩
float targetTorque = readTorqueSensor();
float actualTorque = estimateTorque(current);
// 计算误差及补偿量
float e = targetTorque - actualTorque;
float compensation = fnn.forward(e, e - lastTorqueError);
// 输出补偿后的电流控制信号
setCurrent(baselineCurrent + compensation);
// 注意:在线学习需谨慎使用,通常建议在离线训练完成后固定网络权重
}
核心要点解析:
FNN fnn;
void loop() {
// 读取传感器目标扭矩与估计实际扭矩
float targetTorque = readTorqueSensor();
float actualTorque = estimateTorque(current);
// 计算误差及补偿量
float e = targetTorque - actualTorque;
float compensation = fnn.forward(e, e - lastTorqueError);
// 输出补偿后的电流控制信号
setCurrent(baselineCurrent + compensation);
// 注意:在线学习需谨慎使用,通常建议在离线训练完成后固定网络权重
}
核心要点解析:
// 硬件引脚与变量定义
#define PWM_PIN 9
#define BRAKE_PIN 8
volatile long lastPos = 0;
Encoder encoder(2, 3); // 编码器连接到数字引脚2和3
// 自适应模糊神经网络类实现
class AdaptiveFuzzyNN {
private:
NeuralNetwork nn; // 神经网络模块:处理非线性补偿
FuzzyLogic fuzzy; // 模糊逻辑模块:提供基础规则控制
float learningRate; // 学习率参数,用于在线调整
public:
// 构造函数:初始化神经网络结构(4输入,8隐藏层节点,1输出)
AdaptiveFuzzyNN() : nn(4, 8, 1), learningRate(0.01) {
// 初始化操作(如权重随机化等)
}
// 控制输出计算函数
float computeOutput(float positionError, float velocityError) {
// 第一阶段:模糊逻辑粗调
float fuzzyOutput = fuzzy.evaluate(positionError, velocityError);
// 第二阶段:神经网络基于误差进行动态补偿
float nnInput[4] = {positionError, velocityError, fuzzyOutput, (float)motorLoad};
float nnCorrection = nn.predict(nnInput);
// 第三阶段:融合输出并应用学习机制更新权重
float final = fuzzyOutput + nnCorrection;
nn.train(nnInput, final, learningRate); // 在线训练
return final;
}
};
AdaptiveFuzzyNN afnn; // 实例化自适应控制器
void setup() {
Serial.begin(115200);
encoder.init();
pinMode(PWM_PIN, OUTPUT);
pinMode(BRAKE_PIN, OUTPUT);
}
void loop() {
// 1. 获取当前电机位置与速度
long currentPosition = encoder.read();
float velocity = (currentPosition - lastPos) / 0.02; // 假设循环周期20ms
lastPos = currentPosition;
// 2. 计算控制误差
float posError = targetPosition - currentPosition;
float velError = targetVelocity - velocity;
// 3. 自适应模糊神经网络生成控制量
float controlSignal = afnn.computeOutput(posError, velError);
// 4. 输出PWM信号(需限幅处理)
int pwm = constrain(controlSignal, -255, 255);
analogWrite(PWM_PIN, abs(pwm));
digitalWrite(BRAKE_PIN, pwm == 0 ? HIGH : LOW);
// 5. 实时状态反馈打印
Serial.print("PosErr:"); Serial.print(posError);
Serial.print(" VelErr:"); Serial.print(velError);
Serial.print(" PWM:"); Serial.println(pwm);
delay(20); // 固定控制周期
}
技术要点:
- **架构融合**:采用模糊逻辑进行初步决策,神经网络实时补偿系统非线性与外部扰动
- **自适应学习**:神经网络通过闭环反馈持续更新权重,提升不同负载下的响应精度
- **双输入优化**:引入位置误差与速度误差作为联合输入,增强动态跟踪能力
- **安全设计**:包含PWM输出限幅、制动引脚控制,防止失控或过载损坏
// 温度控制系统片段(含模糊逻辑核心)
float currentTemp = readTemperature();
float error = targetTemp - currentTemp;
static float lastError = 0;
float deltaError = error - lastError;
lastError = error;
// 调用模糊控制器生成输出
float finalOutput = fuzzyControl(error, deltaError);
// 执行加热/冷却动作(例如PID式输出)
analogWrite(HEATER_PIN, constrain(finalOutput, 0, 255));
// 串口监控输出
Serial.print("Temp:"); Serial.print(currentTemp);
Serial.print(" Control:"); Serial.println(finalOutput);
delay(200);
}
// 模糊控制核心函数(简化版)
float fuzzyControl(float e, float de) {
// 注:完整实现应包括模糊化、规则推理与去模糊化
// 此处为概念性映射替代
return map(e, -10, 10, -80, 80); // 根据误差线性映射输出
}
技术要点:
- **混合控制策略**:模糊逻辑负责宏观调节,适用于非精确建模系统
- **动态响应增强**:引入温度变化率(dT)作为第二输入变量,提高抗干扰能力
- **传感器融合**:结合多点测温与环境光传感器数据,减少测量偏差
- **保护机制**:软件层面限制最大输出强度,避免设备过热(实际应用需配合硬件保险)
// 无人机云台稳定系统(基于递归神经网络补偿)
#include <FuzzyLogic.h>
#include <SimpleFOC.h>
#include <RNN.h>
// 硬件对象声明
Encoder encoderX(2, 3), encoderY(4, 5); // 双轴编码器
BLDCMotor motorX(7), motorY(7); // 无刷电机驱动(极对数相同)
IMU imu; // 惯性测量单元
// 模糊集定义:姿态角误差分类
FuzzySet angleError[3] = {
FuzzySet("Small", -5, -2, 0),
FuzzySet("Medium", -3, 0, 3),
FuzzySet("Large", 0, 2, 5)
};
// RNN网络配置:4输入,10隐藏单元,2输出(对应X/Y轴修正量)
RNN rnn(4, 10, 2);
float rnnState[10]; // 存储隐藏层状态
void setup() {
Serial.begin(250000); // 高速串口通信保障实时性
imu.init(); // 初始化IMU传感器
motorX.init(); motorY.init(); // 初始化电机
loadRNNWeights(); // 加载预训练的RNN权重参数
}
void loop() {
// 第一步:获取当前姿态误差
imu.update();
float pitchError = imu.getPitch() - targetPitch;
float rollError = imu.getRoll() - targetRoll;
// 第二步:模糊逻辑生成基础控制量
float fuzzyX = fuzzyAngleControl(pitchError);
float fuzzyY = fuzzyAngleControl(rollError);
// 第三步:构建RNN输入并预测时序补偿值
float rnnInputs[4] = {pitchError, rollError, fuzzyX, fuzzyY};
float rnnAdjust[2];
rnn.predict(rnnInputs, rnnState, rnnAdjust);
// 第四步:合成最终控制指令
motorX.move(fuzzyX + rnnAdjust[0]);
motorY.move(fuzzyY + rnnAdjust[1]);
// 第五步:更新RNN内部状态
memcpy(rnnState, rnn.getHiddenState(), sizeof(rnnState));
}
// 简化的模糊角度控制函数
float fuzzyAngleControl(float angle) {
// 实际系统中应包含完整的多规则模糊推理过程
return angle * 15.0; // 比例控制近似模拟模糊输出
}
技术要点:
- **时序记忆能力**:RNN利用隐藏状态捕捉历史运动趋势,有效抑制高频抖动
- **多源数据融合**:融合IMU角速度与编码器位置反馈,提升姿态估计准确性
- **高性能通信**:使用250kbps串口速率支持快速调试与高频数据回传
- **扩展建议**:可集成卡尔曼滤波算法进一步降低IMU噪声影响
// 初始化模糊规则
fuzzy.addRule("Large AND Fast", "LargeOutput");
fuzzy.addRule("Small AND Slow", "SmallOutput");
float compute(float error, float dError, float load) {
// 1. 执行模糊推理
float fuzzyBase = fuzzy.evaluate(error, dError);
// 2. 神经网络进行补偿计算
float nnInput[4] = {error, dError, load, fuzzyBase};
float adjustment = nn.predict(nnInput)[0];
// 3. 实现在线学习机制
float target = expertControl(error, dError); // 利用专家系统生成理想输出作为训练目标
nn.train(nnInput, target - fuzzyBase, learningRate);
return fuzzyBase + adjustment;
}
float expertControl(float e, float de) {
// 定义专家控制策略,用于指导神经网络的训练过程
return e * 0.8 + de * 0.2;
}
};
AdaptiveFuzzyNN afnn;
void setup() {
Serial.begin(115200);
attachInterrupt(digitalPinToInterrupt(2), updateEncoder, CHANGE);
pinMode(BRAKE_PIN, OUTPUT);
digitalWrite(BRAKE_PIN, LOW); // 释放制动器
}
void loop() {
// 1. 读取当前系统状态
long currentPos = encoder.read();
float velocity = currentPos - lastPos;
lastPos = currentPos;
float loadCurrent = analogRead(A1) * 0.5; // 获取负载电流采样值
// 2. 计算控制输出
float targetPos = 1000; // 设定目标位置
float error = targetPos - currentPos;
float control = afnn.compute(error, velocity, loadCurrent);
// 3. 执行电机控制
setMotorPWM(control);
// 4. 输出监控信息
Serial.print("Pos:"); Serial.print(currentPos);
Serial.print(" Control:"); Serial.println(control);
delay(10); // 控制定时周期为10ms,即100Hz
}
void updateEncoder() {
// 高效处理编码器中断(优化版本)
static uint8_t lastEncoded = 0;
uint8_t MSB = digitalRead(2);
uint8_t LSB = digitalRead(3);
uint8_t encoded = (MSB << 1) | LSB;
if (encoded != lastEncoded) {
encoder.update();
lastEncoded = encoded;
}
}
注意:上述示例主要用于技术思路展示,仅供参考。代码可能存在不完整、逻辑错误或无法直接编译的问题。具体实现需根据所使用的硬件平台、Arduino版本及应用场景进行相应修改。在实际应用前,请务必确认传感器连接正确,理解各设备的电气特性与工作参数,并进行充分测试以保证系统稳定与安全。


 扫码加好友,拉您进群
扫码加好友,拉您进群 全部版块
全部版块 我的主页
我的主页

 收藏
收藏




